
Mars 2020 (mission spatiale)
« Perseverance » redirige ici. Pour les autres significations, voir Persévérance.
Cet article concerne le contexte, les objectifs et les caractéristiques techniques de la mission Mars 2020 et de son astromobile Perseverance. Pour le déroulement de la mission de l'astromobile sur Mars, voir Exploration de Mars par Perseverance. Pour les détails techniques de l'hélicoptère Ingenuity, voir Ingenuity (hélicoptère).
Astromobile

| Organisation |
|
|---|---|
| Constructeur |
|
| Domaine | Collecte d'échantillons du sol martien |
| Type de mission | Astromobile |
| Statut | Mission en cours |
| Lancement | |
| Lanceur | Atlas V 541 |
| Durée de vie | 24 mois (mission primaire) |
| Site | Site JPL |
| Masse au lancement |
~3 650 kg dont 1 025 kg pour l'astromobile (Perseverance) |
|---|---|
| Source d'énergie |
Étage de croisière : panneaux solaires Astromobile : MMRTG |
| Puissance électrique |
Étage de croisière : 1080-2500 Watts Astromobile : 100 Watts |
| Atterrissage | à 20 h 44 TU |
|---|---|
| Localisation | Cratère Jezero |
| MastCam-Z | Caméras |
|---|---|
| SuperCam | Plusieurs spectromètres associés à un laser et une caméra + un microphone |
| RIMFAX | Radar |
| PIXL | Spectromètre de fluorescence à rayons X 2D / microscope |
| SHERLOC | Spectromètre Raman 2D / microscope |
| MEDA | Station météorologique |
| MOXIE | Démonstrateur technologique ISRU |
| MHS (Ingenuity) | Hélicoptère de reconnaissance |

Mars 2020 est une mission spatiale qui consiste à déployer l'astromobile (rover) Perseverance sur le sol martien pour étudier sa surface et collecter des échantillons du sol. Cette mission d'exploration de la planète Mars est développée par le JPL, établissement de la NASA, l'agence spatiale américaine. Elle constitue la première d'une série de trois missions dont l'objectif final est de rapporter ces échantillons sur Terre pour permettre leur analyse.
Les missions martiennes précédentes de la NASA ayant confirmé que l'eau liquide a coulé à la surface de la planète par le passé, les scientifiques en ont déduit que des organismes vivants ont pu se développer à cette époque. L'astromobile Perseverance doit rechercher des terrains ayant pu préserver des indices de cette vie passée. Le retour de ces échantillons sur Terre, une entreprise complexe, risquée et coûteuse, est considéré comme un projet prioritaire par la communauté scientifique.
Pour remplir ses objectifs, l'astromobile doit prélever une quarantaine de carottes de sol et de roches sur des sites sélectionnés à l'aide de ses instruments embarqués. Le résultat de ces prélèvements doit être déposé par l'astromobile sur des emplacements soigneusement repérés avant d'être ramenés sur Terre par une future mission étudiée conjointement par la NASA et l'Agence spatiale européenne. Selon le planning élaboré par les deux agences, le retour sur Terre est prévu pour 2031 sous réserve de son financement. Le but est de pouvoir effectuer sur Terre une analyse fine des échantillons du sol martien, notamment d'identifier d'éventuelles formes de vie anciennes. En effet, les capacités des instruments terrestres, contrairement à ceux embarqués sur les engins spatiaux, ne sont pas limitées par les contraintes de masse.
La sonde spatiale Mars 2020 et l'astromobile Perseverance reprennent l'architecture de Mars Science Laboratory et de son rover Curiosity qui explore depuis la surface de Mars. Perseverance est un engin de plus d'une tonne qui dispose d'une palette d'instruments scientifiques (caméras, spectromètres de différents types) qui sont utilisés pour identifier les sites les plus intéressants, fournir le contexte du prélèvement effectué (caractéristiques géologiques, conditions climatiques à la formation) et effectuer une première analyse chimique : ce sont le spectromètre de fluorescence des rayons X PIXL, le spectromètre Raman SHERLOC, le spectromètre imageur SuperCam et la caméra Mastcam-Z. L'astromobile emporte également une station météorologique (MEDA) et un radar destiné à sonder les couches superficielles du sol martien (RIMFAX). Deux expériences doivent tester sur le terrain des technologies avant leur mise en œuvre de manière opérationnelle dans de prochaines missions : MOXIE produit de l'oxygène à partir de l'atmosphère martienne (ISRU) et MHS (Ingenuity), un petit hélicoptère de moins de deux kilogrammes, teste les capacités d'un engin aérien dans l'atmosphère très ténue de Mars.
Mars 2020 décolle le en profitant de la fenêtre de lancement vers Mars qui s'ouvre tous les 24 à 28 mois. L'astromobile atterrit le dans le cratère Jezero. Ce site, emplacement d'un ancien lac permanent qui conserve les traces de plusieurs deltas de rivière, a été retenu parce qu'il a pu constituer un lieu favorable à l'apparition de la vie et parce qu'il présente une grande diversité géologique. Le coût de la mission Mars 2020 est estimé à 2,5 milliards de dollars en incluant le lancement et la conduite des opérations durant la mission primaire, qui doit durer deux années terrestres.
Déroulement de la mission
[modifier | modifier le code]

La sonde spatiale Mars 2020 développée par la NASA et transportant l'astromobile martien Perserverance est lancée le par une fusée Atlas V. Après une longue phase de transit, elle pénètre dans l'atmosphère martienne à grande vitesse le . Grâce à des techniques mises en œuvre pour la première fois, elle effectue un atterrissage de grande précision sur le terrain accidenté du cratère Jezero. Après une phase de recette au sol des équipements et des instruments scientifiques ainsi qu'une phase d'expérimentation du petit hélicoptère embarqué Ingenuity, l'astromobile se déplacera vers les sites sélectionnés par l'équipe scientifique. Durant sa mission primaire d'une durée de 18 mois, qui devrait être prolongée, il recueillera plusieurs carottes de sol sur différents sites choisis pour leurs caractéristiques géologiques.
Lancement
[modifier | modifier le code]Les spécialistes de la mécanique spatiale de la NASA ont fixé les bornes de la fenêtre de lancement de Mars 2020 vers la planète Mars : celle-ci dépend de la position respective de cette planète par rapport à la Terre. La sonde spatiale doit être lancée entre le et le . Avant et après cette période, le lanceur n'a plus une puissance suffisante permettant à la sonde spatiale d'atteindre Mars. La fenêtre s'ouvre chaque jour à une heure différente durant 30 à 120 minutes. Durant cette période le lancement peut avoir lieu une fois toutes les cinq minutes. À la suite de plusieurs problèmes rencontrés courant juin lors de la mise en place et des tests du lanceur Atlas V (notamment une anomalie sur un capteur du circuit d'alimentation en ergols), la première tentative de lancement est décalée au tandis que les ingénieurs de la NASA repoussent la fermeture de la fenêtre de lancement[Note 1] fixée initialement au 11 août jusqu'au 15 août[1],[2].
La sonde spatiale décolle le à 11 h 50 UTC depuis le complexe de lancement 41 de la base de Cap Canaveral[3]. Elle est placée en orbite par un lanceur Atlas V 541, une des versions les plus puissantes de cette fusée, qui a déjà été mis en œuvre pour la sonde spatiale jumelle Mars Science Laboratory[4],[5]. 50 à 60 minutes après le décollage, la sonde spatiale se sépare du deuxième étage Centaur alors que sa vitesse d'évasion du champ gravitationnel terrestre a atteint 3,8 km/s[6]. Sur sa route vers Mars, la Terre interpose son ombre entre la sonde spatiale et le Soleil. La température d'un des équipements de la sonde spatiale (le circuit de refroidissement au fréon du système de production d'énergie), qui n'est plus réchauffé par le Soleil, tombe temporairement sous la valeur minimale qui a été fixée de manière empirique[Note 2]. Comme dans toutes les situations anormales, la sonde spatiale passe automatiquement en Mode survie et réduit son activité en attendant des instructions du sol. La situation est rapidement rétablie et Mars 2020 entame son transit vers Mars[7].
Transit entre la Terre et Mars (juillet 2020-février 2021)
[modifier | modifier le code]Après sa séparation avec son lanceur, la sonde spatiale entame une phase de croisière, d'une durée d'environ sept mois[Note 3] durant laquelle elle se rapproche de Mars uniquement grâce à sa vitesse acquise. Au lancement, Mars est distante d'environ 105 millions de kilomètres, mais la sonde spatiale va parcourir 472 millions de kilomètres car sa trajectoire, contrainte par la mécanique spatiale, doit décrire une orbite partielle autour du Soleil. Durant son transit vers Mars le rôle actif est joué par l'étage de croisière de la sonde spatiale[8] :
- la sonde spatiale est stabilisée par mise en rotation autour de son axe ;
- l'étage de croisière maintient l'orientation de la sonde pour que ses panneaux solaires et son antenne de télécommunications soient pointés respectivement vers le Soleil et la Terre ;
- l'étage de croisière effectue si nécessaire des petites corrections d'attitude en utilisant son viseur d'étoiles pour détecter les écarts. Trois corrections de trajectoire (Trajectory correction manoeuver ou TCM) sont programmées durant le transit Terre-Mars. La première (TCM-1) qui a eu lieu le 14 août permet de supprimer le biais introduit volontairement pour éviter une retombée de l'étage Centaur sur Mars qui pourrait contaminer la planète. TCM-2 qui a eu lieu le 30 septembre affine encore la trajectoire. La troisième correction TCM-3 doit permettre à la sonde de se présenter exactement au point voulu pour entamer une descente optimale sur le sol martien[9] ;
- la sonde entame les préparatifs pour l'atterrissage sur Mars, qui est la partie la plus délicate de la mission, 45 jours avant celui-ci. D'ultimes corrections de trajectoire (TCM-4 à TCM-6) sont effectuées après des mesures très précises effectuées depuis la Terre portant sur la position et le déplacement de MSL. Les dernières instructions pour la phase de rentrée et la séquence des opérations au sol pour les premiers jours sont actualisées[9].
- Trajectoire de Mars 2020 entre la Terre et Mars
-
 Trajectoire de Mars 2020 avec indication des manœuvres (TCM) effectuées durant cette phase.
Trajectoire de Mars 2020 avec indication des manœuvres (TCM) effectuées durant cette phase. -
 Animation montrant le déroulement du transit de Mars 2020 entre la Terre et Mars.
Animation montrant le déroulement du transit de Mars 2020 entre la Terre et Mars.


Descente et atterrissage sur Mars ()
[modifier | modifier le code]
L'atterrissage sur Mars se décompose en cinq phases :
- l'approche,
- la rentrée atmosphérique pilotée qui fait tomber la vitesse à Mach 2 tout en corrigeant de manière active les écarts par rapport à la trajectoire idéale,
- la descente sous parachute lorsque la vitesse a chuté sous Mach 2,
- la descente propulsée à partir de 2 000 mètres d'altitude grâce à des moteurs chargés d'annuler la vitesse résiduelle,
- et la dépose par l'étage de descente (Sky Crane) fonctionnant à la manière d'un hélicoptère-grue de l'astromobile sur le sol martien.
Phase d'approche
[modifier | modifier le code]
L'objectif de la phase d'approche est que la sonde spatiale arrive au point d'entrée prévu dans l'atmosphère martienne à l'heure prévue. À cet effet une dernière correction de trajectoire (TCM-6) est effectuée, si nécessaire, neuf heures avant la rentrée atmosphérique[10] après analyse de la position et du vecteur vitesse de la sonde. L'erreur de positionnement à l'entrée dans l'atmosphère doit être inférieure à 2 km et la vitesse doit différer de moins de 1,5 m/s de celle prévue. Dix minutes avant de pénétrer dans l'atmosphère martienne, la sonde spatiale largue l'étage de croisière devenu désormais inutile. La rotation de la sonde spatiale est annulée. Cinq minutes avant la rentrée atmosphérique deux lests de 75 kg sont éjectés pour déplacer le barycentre jusque-là situé dans l'axe de la sonde : le déséquilibre ainsi engendré permet par la suite de maintenir un angle d'attaque non nul engendrant lui -même une portance. L'atmosphère martienne beaucoup moins dense que la Terre freine de manière moins efficace la sonde spatiale. La portance va permettre de prolonger la descente[Note 4] et ainsi accroître le temps dont la sonde spatiale dispose pour réduire sa vitesse avant d'arriver au sol. Mars 2020 pénètre dans l'atmosphère à une vitesse de 12 000 km/h. Au cours des huit minutes suivantes, Mars 2020 doit annuler cette vitesse et réussir un atterrissage de grande précision.
Rentrée atmosphérique pilotée
[modifier | modifier le code]
Durant la rentrée atmosphérique pilotée, le freinage atmosphérique réduit fortement la vitesse de la sonde spatiale. L'astromobile est encapsulée entre deux boucliers thermiques jointifs qui le protègent de la chaleur : la température du bouclier avant atteint un pic de 1 450 °C mais le corps de la sonde spatiale reste à une température normale. Durant cette phase, Mars 2020 adapte en permanence son angle d'attaque à l'aide de quatre petits moteurs-fusées, situés sur le bouclier thermique arrière, et émettant des jets de gaz. Grâce à la poussée de ces moteurs, la trajectoire de la sonde spatiale décrit des S en jouant sur l'inclinaison latérale, ce qui lui permet de prolonger la phase de descente. D'autre part, ces moteurs-fusées sont utilisés pour corriger les écarts par rapport à la trajectoire prévue en jouant sur l'angle d'attaque. Celui-ci, maintenu normalement à 18°, est ajusté pour compenser les écarts engendrés par les perturbations atmosphériques et le comportement aérodynamique du véhicule de rentrée. Lorsque la vitesse de l'engin est tombée en dessous de 900 mètres par seconde, l'angle d'attaque est réduit à 0 par éjection de six lests de 25 kg qui replacent le barycentre dans l'axe de la sonde. L'objectif est de limiter les oscillations créées par le déploiement du parachute. La sortie de celui-ci est déclenchée lorsque la vitesse est tombée sous les 450 mètres par seconde (presque Mach 2).
Descente sous parachute
[modifier | modifier le code]
Le parachute d'un diamètre de 21,5 m est, à un facteur d'échelle près, un héritage du parachute développé pour le programme Viking. Ses caractéristiques générales sont proches de celui de Mars Science Laboratory mais il a été renforcé car Mars 2020 est plus lourd. Durant sa descente sous parachute qui dure entre 50 et 90 secondes, la vitesse de Mars 2020 est ramenée à 100 m/s (360 km/h) et environ 95 % de l'énergie cinétique qui subsistait avant son ouverture a été dissipée. Le bouclier thermique avant est éjecté dès que la vitesse tombe en dessous de Mach 0,8[Note 5], ce qui dégage l'antenne du radar Doppler de l'étage de descente qui peut alors fournir une première estimation de l'altitude et de la vitesse en utilisant les réflexions de ses émissions sur le sol martien. Durant cette phase, la sonde doit limiter la rotation de la capsule sous le parachute, un phénomène difficile à modéliser et dangereux qui découle des oscillations à vitesse supersonique ; les moteurs de contrôle d'orientation du bouclier arrière sont utilisés pour contrecarrer ces mouvements.

La sonde spatiale Mars 2020 met en œuvre deux nouvelles techniques qui permettent d'effectuer un atterrissage avec une précision accrue en réduisant de 50 % la taille de l'ellipse dans laquelle l'engin devrait se poser. Cette précision permet de rendre accessible une série de sites intéressant les spécialistes de Mars mais handicapés par un relief plus accidenté (rochers et autres obstacles). Elle permet également de réduire la distance à parcourir par l'astromobile pour atteindre les portions de terrain présentant un intérêt scientifique. La première innovation porte sur les modalités d'ouverture du parachute. Celui-ci n'est plus ouvert seulement lorsque la vitesse a été ramenée en dessous d'un certain seuil, mais cette opération est réalisée en tenant également compte de l'écart de la sonde spatiale par rapport à la trajectoire prévue. Cette trajectoire est calculée à partir de relevés radio effectués juste avant l'entrée dans l'atmosphère martienne, qui permettent de déterminer l'écart avec une précision de 1 à 2 km. Cette connaissance de la trajectoire passe à 2–3 km au cours de la première phase de la descente. Si la trajectoire suivie jusque-là aboutit à dépasser le point d'atterrissage visé, le parachute est ouvert plus tôt ; dans le cas contraire, il est ouvert plus tard. La deuxième nouveauté repose sur l'analyse des photos du terrain situé sous l'engin spatial qui sont prises dès que le bouclier thermique avant est largué et alors que Mars 2020 se situe à une altitude de 4,2 km. Ces images, dont la résolution spatiale atteint six mètres, sont comparées à des photos de la même zone prises auparavant par les satellites en orbite autour de Mars et stockées dans la mémoire de la sonde spatiale. Lorsque le logiciel de reconnaissance optique a identifié sur ces photos quinze points remarquables (cratères, falaises ou rochers de grande taille), il considère que la position de la sonde spatiale est connue avec précision. Il décide alors dans quelle mesure, durant la phase finale propulsée, les moteurs-fusées doivent être utilisés pour modifier le site d'atterrissage. Toutes ces opérations se déroulent en 10 s alors que l'engin spatial continue à descendre sous son parachute. Ce système de vision intelligente permet de faire passer la probabilité d'un atterrissage réussi de 85 à 99 %[11].

Descente retro-propulsée
[modifier | modifier le code]
La descente retro-propulsée a deux objectifs : amener la sonde jusqu'à l'altitude de 18,6 m avec une vitesse verticale résiduelle de 0,75 m/s et une vitesse horizontale nulle, tout en modifiant la trajectoire de la sonde, afin que le rover n'atterrisse pas au même endroit que le bouclier arrière ou le parachute. Au début de cette phase le bouclier arrière et le parachute qui lui est attaché sont largués par déclenchement de charges pyrotechniques. L'étage de descente tombe durant une seconde en chute libre pour s'éloigner suffisamment, puis les 8 moteurs augmentent leur poussée pour parvenir, à une altitude de 100 mètres, à réduire la vitesse verticale à 20 m/s et à annuler la vitesse horizontale. Parallèlement, la sonde est écartée de 300 mètres de la trajectoire suivie par le bouclier et le parachute. La descente se poursuit à la verticale pour disposer d'une mesure de l'altitude précise et corriger une estimation antérieure qui peut être erronée de 50 mètres du fait du relief et du déplacement en partie horizontal de la sonde. À partir de 50 mètres d'altitude, la vitesse verticale est ramenée à 0,75 m/s lorsque l'altitude de 21 mètres est atteinte. La sonde fait alors quasiment du surplace. Si l'engin spatial se dirige vers un site jugé dangereux, il peut utiliser son système de retro-propulsion pour venir se poser jusqu'à une distance de 300 mètres du site d'atterrissage initial[12],[13].
Atterrissage
[modifier | modifier le code]
Alors que l'étage de descente se trouve à 21 mètres au-dessus du sol avec une vitesse horizontale nulle et une vitesse verticale descendante constante limitée à 0,75 m/s, un système pyrotechnique désolidarise l'astromobile Perseverance de l'étage de descente. L'astromobile descend suspendu au bout des trois câbles longs de 7,50 m qui exercent leur traction près du barycentre de l'étage de descente pour éviter de perturber l'équilibre de celui-ci. Les roues du rover sont déployées. Un cordon ombilical relie par ailleurs le rover, dont l'ordinateur contrôle le déroulement de l'opération, et l'étage de descente. Sept secondes après le début de cette séquence, les câbles sont complètement déroulés[14].
- Atterrissage de Perseverance.
-
 Photo prise par le skycrane alors que celui-ci est en train de déposer Perseverance sur le sol martien.
Photo prise par le skycrane alors que celui-ci est en train de déposer Perseverance sur le sol martien. -
 La première photo de la surface de Mars en couleurs prise par Perseverance après l’atterrissage.
La première photo de la surface de Mars en couleurs prise par Perseverance après l’atterrissage. -
 Photo du pont supérieur de l'astromobile prise par la caméra Mastcam-Z équipée d'un zoom.
Photo du pont supérieur de l'astromobile prise par la caméra Mastcam-Z équipée d'un zoom.



.png)
Durant les deux secondes qui suivent, les mouvements provoqués par l'interruption du déroulement des câbles sont amortis. Tout est alors prêt pour la prise du contact avec le sol. Celle-ci est détectée lorsque la traction sur les câbles diminue. Les moteurs réagissent immédiatement en réduisant fortement la poussée exercée jusque là pour maintenir une vitesse de descente constante. L'ordinateur de bord étudie sur une période d'une seconde l'évolution du comportement de l'étage de descente (valeur de la poussée des moteurs et variation de celle-ci), et en déduit que le rover est correctement posé sur le sol. Lorsque le contact avec le sol est confirmé, l'ordre de couper les suspentes au niveau du rover est donné. Puis l'étage de descente, désormais piloté par son propre processeur, entame une manœuvre qui l'écarte de la zone d'atterrissage : la poussée des moteurs est augmentée durant un certain laps de temps pour que l'étage de descente reprenne de l'altitude puis celui-ci modifie son orientation de 45° et ensuite augmente la poussée de ses moteurs jusqu'à 100 % et maintient ce mode de fonctionnement jusqu'à épuisement du carburant. Il est prévu que dans tous les cas de figure l'étage de descente s'écrase à au moins 150 mètres du lieu d'atterrissage du rover. De son côté, l'astromobile détermine dès son arrivée sur le sol sa position avec une précision de 40 mètres contre trois kilomètres pour son prédécesseur Curiosity. L'astromobile Perseverance se pose le à 20 h 44 TU (21 h 44 heure française) après avoir parcouru 472 millions de kilomètres depuis la Terre en 203 jours. L'information parvient sur Terre 11 minutes plus tard[15].

Opérations au sol
[modifier | modifier le code]
La mission primaire a une durée de deux années martiennes à compter de l'atterrissage (687 jours terrestres, un jour martien, ou sol, durant 24 heures 39 minutes terrestres) qui sera sans aucun doute prolongée car sa durée ne permet pas d'atteindre tous les objectifs. Le déroulement prévu des opérations comprend trois phases[16] :
- vérification des systèmes et déploiement des équipements : durée de 60 jours martiens, soit environ 62 jours terrestres ;
- test de l'hélicoptère : durée de 30 jours martiens ;
- réalisation de la mission scientifique.
Phase I : vérification des systèmes et déploiement des équipements
[modifier | modifier le code]La première phase après l'atterrissage, qui a eu lieu le , consiste à réaliser le déploiement des équipements de l'astromobile qui étaient en position repliée pour les protéger, ou pour des raisons d'encombrement, puis à vérifier ces équipements ainsi que les instruments scientifiques. Cette phase doit durer 60 jours martiens (sols).
Durant les 30 premiers jours, tous les systèmes de l'astromobile et ses instruments seront vérifiés et leur fonctionnement sera testé. Les opérations suivantes sont prévues[17],[18] :
- prise d'images immédiatement après l'atterrissage une fois que la poussière est retombée ;
- déploiement du mât et de l'antenne grand gain ;
- images du site d'atterrissage et du pont supérieur de l'astromobile ;
- installation de mises à jour des logiciels installés dans les ordinateurs de l'astromobile ;
- vérification du fonctionnement des instruments scientifiques ;
- test de mobilité avec un déplacement d'environ cinq mètres ;
- déploiement du bras et vérification de sa mobilité ;
- éjection du couvercle protégeant le système de stockage d'échantillon durant l'atterrissage ;
- prise d'images des cibles d'étalonnage par les instruments PIXL et SHERLOC ;
- déploiement du bras qui sera utilisé pour manipuler les tubes devant contenir les carottes de sol et vérification de son fonctionnement.
Les 30 jours suivants sont réservés à des opérations principalement liées à la préparation des tests de l'hélicoptère Ingenuity. Parmi les activités prévues durant cette période figurent la recherche d'une zone propice au test de fonctionnement de l'hélicoptère et l'éjection du couvercle protégeant l'hélicoptère sous le châssis[19].
Phase II : mise en œuvre de l'hélicoptère expérimental
[modifier | modifier le code]L'aérobot martien embarqué Ingenuity est fixé sous l'astromobile. Une fois ce dernier posé à la surface de Mars, l'hélicoptère est déployé puis déposé sur le sol. Après une phase de vérification d'une dizaine de jours, trente jours sont consacrés à tester ses capacités. À cet effet l'astromobile se place à une distance de sécurité (50 à 100 mètres) puis l'hélicoptère s'élève à la verticale jusqu'à une hauteur de trois mètres avant d'exécuter un vol stationnaire durant 30 secondes. Quatre autres vols de quelques centaines de mètres sont prévus. Leur durée peut atteindre 90 secondes[20]. Le premier vol a lieu le 19 avril 2021. Une fois la phase d'expérimentation achevée, l'hélicoptère devait être abandonné sur place[21] mais sa mission est prolongée à la suite des succès obtenus.

Phase III : Opérations en surface
[modifier | modifier le code]

La mission primaire débute une fois la période de mise en service achevée. Durant cette période, l'astromobile doit parvenir à prélever 20 carottes de sol. Il est prévu qu'il parcoure une quinzaine de kilomètres. Pour remplir ses objectifs l'astromobile se déplace afin de trouver des roches formées dans un milieu aqueux ou modifiées par l'action de l'eau et d'en prélever des échantillons. Les roches susceptibles d'avoir préservé des traces chimiques de la vie durant plusieurs milliards d'années sont particulièrement visées. D'autres échantillons sont prélevés sur des roches volcaniques ou d'une nature permettant d'identifier les changements intervenus sur l'environnement du site au cours du temps. Lorsqu'une roche a été sélectionnée, une carotte de celle-ci de 5 centimètres de profondeur est prélevée, broyée et un échantillon de 15 grammes est stocké dans un tube qui est scellé de manière hermétique. Le tube est stocké à bord de l'astromobile. L'équipe projet sur Terre définit le ou les sites dans lesquels les 43 tubes d'échantillons doivent être déposés. Les coordonnées des différents dépôts sont relevés par les orbiteurs martiens avec une précision d'environ 1 mètre[22].
Programmation des opérations
[modifier | modifier le code]L'astromobile n'est que partiellement autonome et le déroulement des opérations doit être établi quotidiennement par les équipes de techniciens et de scientifiques sur Terre. Les échanges entre l'astromobile et la Terre doivent prendre en compte des contraintes importantes : la communication directe nécessite que la surface de Mars soit tournée vers la Terre, la communication via les orbiteurs suppose que le site d'atterrissage soit survolé par celui-ci. Enfin les périodes de jour sur Terre durant laquelle le support (techniciens et scientifiques) est actif ne coïncident pas avec les journées martiennes. Le déroulement des échanges est généralement le suivant[23] :
- les opérations de l'astromobile débutent avec le lever du jour sur Mars ;
- le fichier des commandes à exécuter est transmis depuis la Terre directement à l'astromobile ;
- l'astromobile exécute les opérations programmées ;
- au cours de l'après-midi une partie des données collectées sont transmises à un des orbiteurs lors du survol du site d'atterrissage. Les données à transmettre sont déterminées par un ordre de priorité. Les données sont enregistrées par l'orbiteur puis transmises vers la Terre lorsque celle-ci est en vue ;
- lorsque la nuit tombe, l'astromobile peut continuer à réaliser certaines opérations mais il doit se mettre en veille au moins durant une partie de la nuit pour recharger ses batteries ;
- le matin, l'astromobile se réveille pour transmettre des données à un orbiteur.
Pour préparer les opérations du jour, l'équipe au sol doit commencer par analyser les données transmises la veille en fin de journée par l'astromobile. Grâce à celles-ci, elle s'assure que l'astromobile fonctionne normalement, étudie l'avancement et les résultats obtenus et programme les instructions du jour suivant en tenant compte des objectifs scientifiques fixés et des contraintes qui sont formulées par les ingénieurs. Les nouvelles instructions sont codées puis transmises directement à l'astromobile. Au début des opérations sur Mars, l'équipe au sol vit à l'heure martienne pour optimiser l'enchaînement des opérations : les données sont analysées et les nouvelles instructions sont transmises durant la nuit martienne. Ce mode de fonctionnement impose un décalage de 40 minutes des heures de veille du fait de la longueur du jour martien. Ce rythme épuisant n'est maintenu que durant les 90 premiers jours[23].
Contexte de la mission Mars 2020
[modifier | modifier le code]Mars est la planète du Système solaire qui présente les caractéristiques les plus proches de celles de la Terre. Elle est pour cette raison la destination favorite des missions d'exploration du Système solaire depuis le début de l'ère spatiale. Les sondes spatiales lancées vers cette destination ont cherché à déterminer les principales caractéristiques physiques de la planète et à reconstituer son histoire. Menées principalement par l'agence spatiale américaine, la NASA, ces missions ont pu démontrer, au cours des vingt dernières années, la présence d'eau à la surface de Mars ainsi que, dans le passé, celle d'eau à l'état liquide. L'existence de molécules organiques, briques nécessaires à la formation de la vie, a été plus récemment prouvée à l'aide du mini-laboratoire de l'astromobile Curiosity de la mission Mars Science Laboratory (MSL). Mars 2020 constitue la première des trois missions qui se sont donné pour but de ramener sur Terre des échantillons du sol martien. Il s'agit, grâce aux instruments puissants disponibles dans les laboratoires terrestres, de reconstituer de manière plus précise l'histoire de la planète et d'identifier d'éventuelles traces de vie passée par une analyse poussée à l'échelle moléculaire et atomique.
Mars, destination privilégiée de l'exploration spatiale
[modifier | modifier le code]L'exploration de la planète Mars tient une place particulièrement importante dans les programmes scientifiques d'exploration spatiale du Système solaire. Mars constitue d'abord une destination proche, ce qui permet d'y envoyer relativement facilement des engins spatiaux. De plus, contrairement aux autres planètes du Système solaire et bien qu'elle soit aujourd'hui probablement stérile, Mars a sans aucun doute connu par le passé des conditions assez proches de celles régnant sur Terre qui ont pu, mais cela reste à confirmer, permettre l'apparition de la vie.
Sur le plan scientifique l'exploration de Mars répond à trois objectifs :
- comprendre la genèse de la planète et son évolution ;
- reconstituer l'histoire de son climat ;
- savoir si Mars peut abriter la vie ou si elle l'a abritée par le passé.
Les réponses à ces trois questions sont susceptibles de nous aider à comprendre notre propre planète.
Exploration de Mars par les missions robotiques
[modifier | modifier le code]Pour des raisons à la fois de faisabilité technique et de coût, aucun projet d'exploration par un équipage d'astronautes n'a jusque dans les années 2010 été mis en œuvre[Note 6]. Aussi, depuis le début de l'ère spatiale, l'exploration de Mars est-elle confiée à des missions robotiques et elle le restera sans doute pour les vingt années qui suivent. Ces missions ont permis progressivement de mieux connaître cette planète sans pour autant apporter des réponses définitives aux principales interrogations scientifiques. Les engins spatiaux qui ont fait le plus progresser notre connaissance sont des orbiteurs (sondes spatiales placées en orbite autour de Mars) capables, grâce à des instruments d'une sophistication croissante, de collecter des données sur la surface de l'ensemble de la planète, son atmosphère ainsi que dans une certaine mesure son sous-sol.
Découverte de la stérilité de Mars
[modifier | modifier le code]Des sondes spatiales ont été lancées vers Mars pratiquement dès le début de l'ère spatiale. La première à atteindre cette planète avec une instrumentation opérationnelle, Mariner 4 (1965), réduit à néant les spéculations sur la présence d'une vie analogue à celle de la Terre en confirmant l'absence d'une atmosphère dense et donc d'eau liquide à la surface ainsi que l'absence de champ magnétique pouvant protéger les organismes vivants complexes des rayonnements solaires (ultraviolet) et galactiques (rayons cosmiques). Les sondes spatiales Viking, qui se posent à la surface de la planète en 1975, procèdent à des analyses d'échantillons du sol sans pouvoir découvrir d'indices d'une vie présente ou passée. Les instruments démontrent la nature très oxydante du sol martien, qui ne permet pas à des bactéries de se développer. Ces résultats décevants entraînent une pause de 20 ans dans le programme d'exploration mené quasi exclusivement par l'agence spatiale américaine, la NASA.
À la recherche de l'eau
[modifier | modifier le code]| Mission | Lancement | Eau ? | Habitabilité ? | Vie ? |
|---|---|---|---|---|
| Mars Global Surveyor | 1996 | X | ||
| Mars Pathfinder | 1996 | X | ||
| 2001 Mars Odyssey | 2001 | X | ||
| Mars Express | 2003 | X | ||
| MER (Spirit et Opportunity) | 2003 | X | ||
| Mars Reconnaissance Orbiter | 2005 | X | ||
| Phoenix | 2007 | X | X | |
| MSL (Curiosity) | 2011 | X | X | X |
| MAVEN | 2013 | X | X | X |
| ExoMars Trace Gas Orbiter | 2016 | X | X | |
| InSight | 2018 | X | X | |
| Mars 2020 | 2020 | X | X | |
| Rosalind Franklin | 2022 | X | X |


La sonde spatiale Mars Global Surveyor de la NASA (1996) relance l'intérêt pour Mars en découvrant depuis son orbite des dépôts sédimentaires qui démontrent que Mars a connu une période chaude durant laquelle l'eau était liquide à sa surface. Les années 2000 sont des années très fructueuses. Les instruments de l'orbiteur européen Mars Express (2003) permettent de confirmer la présence de grandes quantités d'eau stockée sous forme de glace au niveau des calottes polaires, détectent la présence de traces de méthane d'apparition récente dans l'atmosphère de la planète dont l'origine pourrait être soit biologique soit volcanique, et enfin découvre des sédiments argileux qui n'ont pu apparaître qu'en présence d'eau restée liquide et faiblement acide sur de longues périodes donc propice à la vie. Mars Reconnaissance Orbiter (2006), doté de caméras particulièrement puissantes, affine toutes ces découvertes en effectuant un inventaire systématique des terrains reflétant la présence d'eau : plus de 100 000 dépôts sédimentaires (argiles, de carbonates) sont détectés toutefois ceux-ci ne représentent que 1% de la surface de Mars. L'orbiteur détecte également la présence d'eau à des latitudes relativement basses confirmant que l'atmosphère martienne conserve les traces d'un changement récent d'inclinaison de l'axe de la planète[25].
Missions d'exploration de la surface
[modifier | modifier le code]Les atterrisseurs (fixes) et les astromobiles, capables de circuler sur le sol, jouent un rôle de plus en plus important dans l'exploration de Mars à compter du début des années 2000 : leur principal rôle est de valider sur le terrain les déductions tirées des observations des orbiteurs. Les rovers MER (2003) de 174 kg sont les premiers à effectuer un travail de géologue avec toutefois une palette d'instruments limitée par les contraintes de poids. L'atterrisseur statique Phoenix (2008) aux ambitions relativement modestes se pose dans la région du pôle Nord martien. Il confirme la présence de glace d'eau à la surface de la planète mais découvre que le sol contient une proportion importante de perchlorates peu propice à la vie.
L'objectif principal de la NASA - la détection de la présence d'eau et de son action passée ou présente à la surface - étant désormais pratiquement atteint, la stratégie d'exploration se tourne vers la recherche de molécules prébiotiques indispensables à l'apparition de la vie ou de molécules produites par des formes de vie identifiables par leur signature isotopique. Cet objectif est confié à l'astromobile lourd Curiosity (environ une tonne) de la mission Mars Science Laboratory (MSL). Celui-ci est équipé de mini-laboratoires capables d'analyser à l'échelle atomique et moléculaire des échantillons de sol. Il se pose en 2012 dans le cratère Gale à proximité d'un dépôt argileux prometteur qu'il atteint en 2019. Les premiers résultats indiquent que le sol de Mars contient des molécules organiques complexes, un indice important, toutefois en très faibles quantités. Aucune biosignature, indice direct de présence de vie présente ou passée, n'est toutefois détectée mais ce résultat pourrait s'expliquer par l'action des rayons cosmiques qui dans la durée ont cassé les molécules complexes présentes dans les couches superficielles du sol. D'autres résultats, nécessitant des travaux complexes sur Terre, sont toujours attendus courant 2020[25].
Retour d'échantillons martiens sur Terre comme objectif
[modifier | modifier le code]La communauté scientifique internationale considère depuis plusieurs décennies que seule une analyse d'échantillons de sol martien ramenés sur Terre peut permettre de trancher la question de la présence de la vie passée ou présente sur Mars[26]. En effet, les indices d'une éventuelle vie martienne sont complexes à détecter, car se mesurés au niveau atomique ou moléculaires, et les instruments envoyés sur le sol martien sont limités par leur masse (quelques dizaines de kilogrammes). Les équipements disponibles sur Terre ont des capacités de mesure sans commune mesure. De plus, certaines analyses ne peuvent être automatisées et ne peuvent donc être effectuées par des robots envoyés à la surface de Mars. Enfin, une fois les échantillons de sol rapportés sur Terre, les analyses peuvent être recommencées avec plusieurs types d'instrument et bénéficier de futurs progrès des outils d'investigation.
Envisagée dès les années 1980, une mission ramenant des échantillons de sol martien a fait l'objet de dizaines d'études qui n'ont toutefois jamais abouti. Son coût (jusqu'à 10 milliards de dollars américains) la range dans la même catégorie que les missions spatiales les plus complexes menées jusque-là dans le système solaire et le risque est particulièrement important : enchainement complexe d'opérations, premières technologiques (aller-retour Terre-Mars, atterrissage de très grande précision, décollage depuis le sol martien). Mais en 2013 la mission Mars Science Laboratory a levé une importante barrière en validant une technique d'atterrissage de précision ce qui permet d'envisager le passage à la phase suivante de l'exploration de Mars. Selon le scénario mis au point par la NASA pour ramener les échantillons sur Terre trois missions distinctes doivent être enchainées : la première identifie les sites propices puis collecte et stocke les carottes du sol martien, la deuxième ramène les échantillons en orbite martienne et la dernière ramène ceux-ci sur Terre. Mars 2020 est chargée de réaliser la première étape de cette mission.
Bilan de l'exploration : des questions toujours en suspens
[modifier | modifier le code]Les données collectées par les différentes missions spatiales ont permis de reconstituer une grande partie l'histoire de Mars mais de nombreuses questions restent en suspens[25] :
- Mars a connu une période chaude avec une atmosphère dense durant ses 500 premiers millions d'années d'existence. Mais, il y a 3,9 à 4 milliards d'années, le noyau métallique (fer et nickel) de la planète s'est tellement refroidi que les mouvements de convection au sein du métal liquide ont cessé. Le champ magnétique généré par cette dynamo naturelle a alors disparu. L'atmosphère, qui n'était plus protégée du vent solaire, s'est progressivement échappée dans l'espace en mettant fin à l'effet de serre et en entrainant un refroidissement progressif de la surface. Il y a 3,5 milliards d'années la surface de Mars est devenu le désert glacé actuel ;
- l'eau a coulé à la surface de Mars durant deux périodes distinctes de son histoire. Il y a environ 4,1 milliards d'années des fleuves relativement courts (quelques centaines de kilomètres) et larges (quelques kilomètres) ont laissé des traces sur les parties les plus anciennes de la surface sous forme de vallées ramifiées comme Nanedi Vallis. Certains indices donnent à penser que l'origine des eaux était souterraine. Ces écoulements ont duré entre quelques centaines et quelques milliers d'années. Le deuxième épisode aqueux se situe entre 3 et 3,7 milliards d'années. D'énormes écoulements (débits allant jusqu'à 1 km3/s soit des milliers de fois le débit du fleuve Amazone) se sont produits sur des périodes très brèves (quelques jours à quelques semaines) en creusant des vallées relativement rectilignes larges de 10 à 100 kilomètres et dont la longueur peut atteindre 2 000 kilomètres. Ces vallées de débâcle auraient eu pour origine la fonte de la glace stockée dans le sous-sol provoquée notamment par des éruptions volcaniques ;
- le sous-sol de Mars conserve une épaisse couche de glace d'eau (jusqu'à 450 mètres d'épaisseur selon certaines estimations) enfouie plus ou moins profondément : celle-ci se situe à 150 mètres de profondeur au niveau de l'équateur et vient affleurer la surface au niveau des pôles ;
- des deltas de rivière et donc des lacs associés aux vallées ramifiées ont laissé leurs traces à la surface de Mars ce qui implique que l'eau a pu subsister à l'état liquide sur des périodes plus ou moins longues (la durée de ces lacs fait partie des questions qui font débat) faisant de ces sites, tel que le cratère Jezero site d'atterrissage de Mars 2020, des lieux propices à la formation de la vie. Des argiles hydratées datant de la période d'apparition des vallées ramifiées (4,1 milliards d'années) et des sulfates hydratés correspondant au deuxième épisode aqueux témoignent de l'action de l'eau à la surface de Mars ;
- aucune trace de vie présente n'a été détectée à la surface. Si elle subsiste c'est à de grandes profondeurs là où la pression et la température peuvent lui être favorables. La détection par les orbiteurs martiens, notamment ExoMars Trace Gas Orbiter, de traces de méthane très ténues et fluctuantes pourraient en être la manifestation mais beaucoup d'autres explications, basées sur des sources non biologiques, sont envisageables. En ce qui concerne les indices de vie passée, aucune donnée prouvant son existence n'a jusqu'à présent été découverte avec les instruments aux capacités limitées utilisés jusque-là à la surface de Mars.
Historique du projet Mars 2020
[modifier | modifier le code]Recommandations du Conseil national de la recherche des États-Unis
[modifier | modifier le code]Le Rapport décennal sur les sciences planétaires rédigé en 2011 par des représentants de la communauté scientifique et publié par le Conseil national de la recherche des États-Unis définit les objectifs scientifiques prioritaires de l'exploration spatiale pour la décennie à venir. Le rapport place au premier rang le retour d'un échantillon de sol martien sur Terre. Il recommande que l'agence spatiale américaine, la NASA, lance avant 2022 la mission réalisant la première étape de ce programme, c'est-à-dire la mission de collecte des échantillons, dans la mesure où son coût peut être maintenu sous la barre des 2,5 milliards de dollars. À l'époque la NASA a entamé une collaboration avec l'Agence spatiale européenne pour ramener des échantillons sur Terre. La première mission de ce projet, à la charge de la NASA, est baptisée Mars Astrobiology Explorer-Cacher (MAX-C). L'architecture de cette mission repose sur celle de Mars Science Laboratory qui est sur le point d'être lancée par la NASA[27].
Lancement du projet
[modifier | modifier le code]En 2011 la NASA, pour des raisons budgétaires, décide d'annuler le projet MAX-C. La mission de retour d'échantillons martiens est repoussée à une date indéterminée[28].
Mais à la suite de l'atterrissage réussi de l'astromobile Curiosity (mission Mars Science Laboratory) en , le président des États-Unis Barack Obama décide d'inclure dans le budget de la NASA la réalisation d'un nouveau rover martien. Contrairement à la démarche habituelle cette décision est prise sans qu'aucun objectif scientifique n'ait été fixé à la future mission. Ce projet est rendu public par la NASA le , au cours d'un congrès de l'Union américaine de géophysique à San Francisco : l'astromobile, qui reprend l'architecture du MSL/Curiosity y compris le système de rentrée atmosphérique et d'atterrissage, doit être lancé vers Mars en 2020. La charge utile de l'astromobile doit être différente de celle de Curiosity. Grâce à la réutilisation des composants du MSL, l'agence spatiale table sur un coût de 1,5 milliard de dollars contre 1,5 milliard pour MSL[29],[30],[31].
Définition des objectifs de la mission
[modifier | modifier le code]Rapport de 2013
[modifier | modifier le code]En , à la demande de la NASA, un comité issu de la communauté scientifique (la Science Definition Team ou SDT) est constitué pour définir les objectifs de la future mission. Le rapport de plus de 150 pages rendu début fixe comme principal objectif la collecte d'échantillons martiens et leur stockage à la surface de la planète en attendant une mission chargée de les ramener sur Terre. Il lance donc le projet de retour d'échantillons de sol martien sur Terre régulièrement différé sans toutefois que soit planifié et financé ce retour. Les autres recommandations du document sont les suivantes[32],[33] :
- Les recherches scientifiques menées sur place doivent être rigoureuses, diversifiées et doivent inclure la détection de signatures biologiques.
- Les carottes prélevées doivent permettre de répondre aux différentes questions scientifiques soulevées par Mars.
- La technique d'atterrissage doit être plus précise pour permettre d'accéder aux sites les plus intéressants sur le plan géologique.
- La mission doit collecter les données critiques nécessaires aux futures missions avec équipage qui seront envoyées à la surface de la planète.
- La mission doit réutiliser les composants de Mars Science Laboratory pour réduire son coût.
Ce rapport préconise également de modifier le système de télécommunications utilisé par l'astromobile Curiosity pour que celui-ci puisse transmettre directement ses données vers la Terre au cas où le relais assuré actuellement en UHF par les orbiteurs martiens ne serait plus opérationnel dans les années 2020. La modification baptisée DTE (Direct-to-Earth) consiste à remplacer l'antenne grand gain par une antenne de plus grande taille et à remplacer l'amplificateur actuel par un tube à ondes progressives plus puissant[34]. Mais cette option n'est pas retenue. Pour les instruments le rapport propose deux configurations de la charge utile de masse totale équivalente et pouvant remplir les objectifs fixés à la mission. Les trois instruments les plus complexes de MSL - SAM, ChemCam et CheMin - n'en font pas partie. Ils sont en partie remplacés par de nouveaux instruments plus performants (comme la SuperCam à la place de la ChemCam) :
| Fonctionnalité | Configuration 1 (bleue) | Coût | Configuration 2 (orange) | Coût |
|---|---|---|---|---|
| Contexte (image) | Mastcam ou dérivé | Moyen | Mastcam ou dérivé | Moyen |
| Contexte (minéralogie) | UCIS[Note 7] ou dérivé | Moyen | miniTES[Note 8] ou dérivé | Moyen |
| Chimie des éléments | APXS[Note 9] ou dérivé | Faible | μXRF[Note 10] ou dérivé | Faible |
| Imagerie à petite échelle | MAHLI[Note 11] ou dérivé | Moyen | ||
| MMI[Note 12] ou dérivé | Moyen | |||
| Minéralogie à petite échelle | Green Raman[Note 13] ou dérivé | Élevé | ||
| Détection des matériaux organiques | Deep-UV ou dérivé | Élevé | ||
| Équipements en support de l'activité scientifique | Ceci comprend le système de collecte et de stockage d'échantillons, ainsi que les instruments de préparation des surfaces rocheuses (brosse, etc.) | |||
| Coût configuration minimale | ~ 90 M de dollars | ~ 90 M de dollars | ||
| Instruments optionnels | GPR[Note 14] | Moyen | GPR | Moyen |
| Contribution au programme habité | ISRU[Note 15] | ISRU | ||
| Modifications technologiques | TRN et Range Trigger | |||
| Coût total | ~ 105 M de dollars | ~ 105 M de dollars | ||
Objectifs détaillés
[modifier | modifier le code]Le rapport rédigé par la Science Definition Team assigne cinq objectifs à la mission de Mars 2020 :
- explorer un environnement susceptible d'avoir accueilli la vie en analysant son histoire et les processus géologiques qui s'y sont déroulés[36].
- rechercher des indices de signatures d'origine biologique dans une sélection de sites[37] :
- déterminer l'habitabilité de l'environnement par le passé de la zone explorée.
- si la zone a pu abriter des formes de vie, rechercher des matériaux qui ont pu préserver des signatures biologiques.
- recherche des indices potentiels de la vie en utilisant des techniques d'observation permettant de respecter les règles de protection planétaire.
- collecter des échantillons de sol martien en connaissant leur contexte géologique précis pour permettre une future mission de retour d'échantillons du sol martien sur Terre[38] :
- collecter des échantillons sélectionnés scientifiquement avec description précise du terrain. Les échantillons devront à la fois être les plus susceptibles de permettre l'identification d'indices de vie et bien représenter la diversité de la région explorée par l'astromobile.
- assurer que la collecte se fasse en respectant les règles de protection planétaire et que les échantillons pourront être effectivement utilisés par la future mission de retour d'échantillon.
- préparer les futures missions habitées sur le sol martien en testant des technologies (ISRU, etc.), analysant les conditions régnant à la surface de Mars — rayonnement, température, poussière... — et améliorant les connaissances sur les conditions de rentrée atmosphérique (MEDLI+)[39],[38] :
- réaliser une démonstration des technologies d'utilisation des ressources in situ en produisant des ergols et de l'oxygène à partir de l'atmosphère martienne[40],[41].
- déterminer la morphologie et la taille de la poussière pour comprendre son incidence sur les opérations à la surface de Mars et sur la santé des astronautes :
- mesurer les caractéristiques du climat à la surface de Mars pour valider les modèles de circulation atmosphérique de la planète.
- mesurer les performances du véhicule de descente avec une série de capteurs dans les boucliers thermiques avant et arrière.
Conception et construction de la sonde spatiale
[modifier | modifier le code]
Sélection des instruments et du lanceur
[modifier | modifier le code]La sélection des instruments embarqués est figée par la NASA en . Le lanceur Atlas V 541 qui a placé en orbite la sonde spatiale Mars Science Laboratory est également retenu pour le lancement de Mars 2020[4].
Hélicoptère expérimental MHS
[modifier | modifier le code]
En , les responsables de la NASA, après une phase d'évaluation, décident que Mars 2020 embarquera à titre expérimental le petit hélicoptère Mars Helicopter Scout (MHS) de 1,8 kg chargé de tester le recours à des vols de reconnaissance optique. Cette expérimentation doit durer une trentaine de jours. Le responsable scientifique de la mission s'oppose en vain à cette décision car il estime que ces tests empièteront sur le déroulement très tendu des opérations au sol. Le coût de cette expérimentation, évalué à 55 millions de dollars n'est pas pris en charge par le projet Mars 2020[20],[21].
Assemblage et tests de la sonde spatiale
[modifier | modifier le code]
La conception générale de la sonde spatiale est figée et validée en (phase B). Les spécifications détaillées et la construction de Mars 2020 (phase C) peuvent débuter[42]. Le parachute qui doit freiner la sonde spatiale durant sa descente vers le sol de Mars est testé à l'aide d'un tir effectué par une fusée-sonde Black Brant effectué en octobre 2017[43]. L'assemblage de l'étage de descente débute en mars 2018 dans les locaux du Jet Propulsion Laboratory à Pasadena (Californie)[44]. Durant des tests effectués durant le premier trimestre 2017 sur la structure du bouclier thermique d'un modèle de test, une fracture est détectée. Toutefois cet incident ne remet pas en cause la conception du bouclier (inchangée par rapport à Mars Science Laboratory) et ne modifie pas la date de lancement[45]. Le troisième test effectué avec une fusée-sonde Black Brant en octobre 2018 permet de valider une version renforcée du parachute de Mars Science Laboratory qui sera utilisée pour Mars 2020. Le parachute a résisté à une traction de 37 tonnes (soit 85% de plus que ce qui est prévu) à vitesse supersonique[46].
Les premiers tests électriques et informatiques des différents composants de la sonde spatiale débutent en mars 2019 dans la salle blanche numéro 1 du centre JPL[47]. Les tests de l'hélicoptère NHS dans une chambre à vide de 7,62 mètres de diamètre reproduisant l'environnement de Mars — composition et pression de l'atmosphère et température descendant jusqu'à -90°C — s'achèvent avec succès au même moment[48]. Le système de déploiement sur le sol de Mars de l'hélicoptère est testé chez Lockheed Martin[49]. Un premier assemblage de l'ensemble des éléments de la sonde spatiale est effectué en avril pour identifier d'éventuelles erreurs de dimensionnement. L'ensemble est ensuite utilisé en mai pour effectuer des tests dans une chambre à vide et réaliser des tests acoustiques simulant la phase de lancement[50],[51]. En juin, le mât sur lequel sont fixés la caméra Mastcam-Z et les capteurs de SuperCam et de la station météorologique sont assemblés avec l'astromobile[52], puis c'est le tour des roues[53] et du bras[54]. La partie interne de l'instrument SuperCam est installée dans le corps de l'astromobile début juillet[55]. Le fonctionnement du bras est testé le même mois[56]. En août le dernier composant important de l'astromobile, le système de carrousel qui fournit les forets, est à son tour mis en place[57].
L'astromobile est placé sur une table tournante pour déterminer son centre de gravité. À l'issue de ces mesures, neuf masses d'une masse totale de 20 kilogrammes sont fixées à différents points du rover pour l'équilibrer parfaitement[58]. La procédure de séparation de l'étage de descente et de l'astromobile est testée en octobre. Il s'agit essentiellement de s'assurer que les dispositifs pyrotechniques fonctionnent sans générer de dégâts[59]. En octobre le rover est déplacé de la salle d'assemblage vers celle destinée à tester son fonctionnement[60]. En application d'une procédure standard, une étude sur les risques liés à la présence de plutonium embarqué est rendue publique. Selon celle-ci, dans le scénario le plus pessimiste (dispersion du plutonium en dehors de son blindage à la suite d'une destruction du lanceur immédiatement après son lancement dont la probabilité est évaluée à 1 sur 960), la dose maximale de radioactivité subie par une personne présente sur le pas de tir est considérée comme faible et équivalente à huit mois de radioactivité naturelle[61].
En décembre 2019 l'astromobile effectue ses premiers tours de roue. Le véhicule de rentrée développé par Lockheed Martin est de son côté transféré le même mois à la base de lancement de Cap Canaveral en Floride. Mi-février 2020, l'astromobile est à son tour convoyé depuis les locaux du Jet Propulsion Laboratory en Californie, où il a été assemblé, vers Cap Canaveral pour y être testé, assemblé avec l'étage de croisière et le véhicule de rentrée et préparé avant son lancement[62].
Coût de Mars 2020
[modifier | modifier le code]Le coût de la mission Mars 2020 est évalué initialement en 2012 entre 1,3 et 1,7 milliard de dollars. Une fois la phase de conception achevée, il est figé à 2,44 milliards de dollars et reste stable sur la période 2014-2016. Ce coût inclut 576 millions de dollars pour les opérations de lancement et l'acquisition du lanceur Atlas V ainsi que 456 millions de dollars pour la conduite des opérations durant la mission primaire de deux ans. Ce dernier chiffre incorpore des réserves permettant de faire face à des dépassements en phase de développement[63]. Plusieurs difficultés rencontrées durant la phase de développement, en particulier dans la mise au point des instruments PIXL, SHERLOC et du système de gestion des échantillons, entraine une augmentation du coût de la mission de 359,3 millions. Cet accroissement est partiellement compensé par une réduction des coûts de gestion en phase opérationnelle évaluée à 84 millions de dollars. Le coût total du projet est évalué en avril 2020 à 2 725,8 millions[64]. Le développement du petit hélicoptère Mars Helicopter Scout (MHS - Ingenuity) a de son côté coûté 80 millions de dollars auxquels il faut ajouter 5 millions de dépenses pour sa mise en œuvre sur Mars[65].
Site d'atterrissage
[modifier | modifier le code]Critères de sélection
[modifier | modifier le code]Le site d'atterrissage de Mars 2020 est, comme dans le cas de Curiosity, sélectionné par consultation de la communauté internationale des spécialistes de Mars. Le site retenu doit avoir par le passé, vu circuler de l'eau et, par ailleurs, répondre aux critères suivants[38] :
- le site permet de remplir les objectifs scientifiques ;
- les roches présentent des caractéristiques qui permettent de supposer que dans des conditions environnementales appropriées, des formes de vie ont pu apparaître ;
- les roches et le régolithe remontant à l'époque où l'environnement était favorable à la vie sont présents sur le site ;
- les roches présentes ont été altérées par des processus géologiques et environnementaux y compris ceux nécessitant la présence d'eau ;
- le type de roche présent a pu préserver les caractéristiques physiques, chimiques, minérales et moléculaires d'une vie passée ;
- le site présente un potentiel scientifique important si les échantillons de sol martien peuvent revenir sur Terre ;
- le site dispose de ressources en eau (sous forme de glace d'eau ou de minéraux comprenant une proportion d'eau) que l'astromobile peut étudier pour en comprendre le potentiel dans le cadre des futures missions avec équipage ;
- le site permet à l'astromobile d'atterrir et de circuler sans rencontrer des incidents de terrain constituant une menace importante pour la mission.
Déroulement du processus de sélection
[modifier | modifier le code]Initialement, 28 sites d'atterrissage sur Mars sont proposés et classés en [66]. Dix sites sont sélectionnés au cours d'une deuxième séance de travail qui a lieu en . Dans l'ordre de leur classement (en commençant par le mieux noté), ce sont[67] : le cratère Jezero (18,50 N, 77.40 E), les Columbia Hills (cratère Goussev, 14,40 S, 175,60 E), Syrtis Major Planum (17,80 N, 77,10 E), le cratère Eberswalde (23,00 S, 327,00 E), le bassin Melas (12,20 S, 290,00 E), Nili Fossae (21,00 N, 74,50 E), Nili Fossae Carbonate (21,90 N, 74,50 E), Mawrth Vallis (24,00 N, 341,10 E), le cratère Holden (26,40 S, 325,10 E) et le cratère McLaughlin (21,90 N, 337,80 E).
En , une deuxième séance de travail réduit le nombre de sites à trois : cratère Jezero, Syrtis Major Planum et Columbia Hills. Les deux premiers ont des appréciations largement au-dessus du troisième[68]. Le cratère Jezero est finalement sélectionné en .

Cratère Jezero
[modifier | modifier le code]Mars 2020 doit explorer le cratère Jezero, autrefois emplacement d'un lac permanent et qui conserve les traces de plusieurs deltas de rivière. Le site est sélectionné par la communauté scientifique parmi soixante candidats. Le cratère (18.4°N, 77.7°E) est situé dans la région de Nili Fossae. Il se trouve, comme le cratère Gale exploré par l'astromobile Curiosity, à la limite qui sépare la plaine qui recouvre l'hémisphère nord de la planète et les plateaux élevés et souvent accidentés recouvrant l'hémisphère sud. Le cratère Jezero se situe sur la bordure nord-ouest du bassin Isidis Planitia dernier épisode sur Mars du grand bombardement et qui remonte à plus de 3,9 milliards d'années. Le choc de l'impact est à l'origine du réseau de failles Nili Fossae situé à l'ouest du cratère Jezero. Ce dernier est formé par un impact postérieur. Par la suite deux réseaux de rivières alimentées par des précipitations neigeuses drainent la région en déversant leurs eaux dans le cratère Jezero. Un lac d'une profondeur d'au moins 250 mètres est alors formé dans le cratère. Une brèche dans la bordure nord-est du cratère a permis aux eaux de s'écouler vers l'extérieur[69]. Le cône de déjection est visible sur Google Maps[70].
Selon les observations effectuées par les instruments de l'orbiteur Mars Reconnaissance Orbiter, les terrains situés dans ce cratère de 45 kilomètres de diamètre comportent cinq différents types de roches dont des argiles et des carbonates. Le site, très prometteur du fait de cette diversité géologique, constitue un terrain d'atterrissage difficile car on y trouve à l'est de nombreux rochers, des falaises à l'ouest et des dépressions remplies de dunes de sable à différents emplacements. Mais les améliorations apportées par la NASA dans les techniques de guidage durant la descente de l'astromobile vers le sol, se traduisent par une réduction de la taille de l'ellipse d'atterrissage de 50 % par rapport à la mission de Curiosity en 2012 et permettent désormais d'accéder à ce type de site[71].

Caractéristiques techniques de la sonde spatiale
[modifier | modifier le code]La sonde spatiale Mars 2020 reprend l'architecture de l'engin de la mission Mars Science Laboratory. Comme celui-ci et comme les sondes spatiales ayant atterri sur Mars qui l'ont précédé, il se compose de quatre éléments principaux (cf. schéma 1) :
- l'étage de croisière qui assure le transit entre la Terre et Mars.
- le véhicule de rentrée qui protège la sonde durant la rentrée atmosphérique et assure une première phase de freinage.
- l'étage de descente qui accomplit la dernière phase de descente puis dépose en douceur l'astromobile sur le sol martien.
- l'astromobile proprement dit chargé de mener à bien la mission sur le sol martien.
 |

|
| À gauche Mars 2020 en cours d'assemblage final. À droite Schéma 3 : Vue éclatée de la sonde spatiale. 1 – Étage de croisière, 2 – Bouclier arrière, 3 – Étage de descente, 4 – Astromobile, 5 – Bouclier thermique avant, 6 – Logement du parachute. | |
| Composant principal | Référence schéma |
Sous-composant | Masse (kg) | Commentaire |
|---|---|---|---|---|
| Étage de croisière | 1 | — | 539 kg | dont 70 kg de carburant |
| Véhicule de rentrée et étage de descente |
5 | Bouclier thermique avant | 440 kg[72] | — |
| 2 | Bouclier arrière | 575 kg[72] | — | |
| 3 | Étage de descente | 1 070 kg[72] | dont 400 kg de carburant | |
| — | Total | 2 400 kg | [Note 16] | |
| Astromobile | 4 | — | 1 025 kg | — |
| Sonde spatiale Mars 2020 | — | Masse totale | ~3 650 kg | — |
Modifications apportées par rapport au Mars Science Laboratory
[modifier | modifier le code]
Les caractéristiques de Mars 2020, hormis les instruments scientifiques et le système de prélèvement et de stockage des échantillons de sol martien diffèrent très peu de celles de Mars Science Laboratory. Elles sont principalement destinées à améliorer la précision de l'atterrissage et diminuer les risques liés à cette phase :
- Range Trigger (RT) : l'ouverture du parachute du MSL est conditionnée par la vitesse de l'engin spatial. La modification envisagée pour la future mission consiste à déclencher cette ouverture lorsque la distance à la zone visée devient inférieure à une certaine valeur. Cette modification qui peut être mise en œuvre sans évolution majeure de la sonde spatiale (l'information est déjà disponible) permet d'abaisser la longueur du grand axe de l'ellipse d'atterrissage de 25 à 13-18 km[73] ;
- Terrain-Relative Navigation (TRN) : il s'agit d'utiliser les images fournies par les caméras embarquées lors de la descente vers le sol pour déterminer la position du module de descente et atterrissage par rapport à sa cible avec une précision d'environ 60 mètres au lieu d'un à deux kilomètres avec MSL. Cette précision permettra d'éviter les zones de terrain les plus accidentées en utilisant les capacités de l'étage de descente à dévier de sa trajectoire. Cette capacité est déjà utilisée lors de la séparation de l'étage de descente avec le bouclier arrière et le parachute. L'étage de descente dispose de suffisamment de carburant pour s'écarter de sa trajectoire d'environ 300 mètres[74] ;
- les roues de l'astromobile Perseverance ont été modifiées (sculptures, largeur...) pour limiter leur dégradation sur les sols rocheux.
Le recours à des panneaux solaires au lieu du générateur thermoélectrique à radioisotope multi-mission (MMRTG) utilisé par le MSL a été envisagé mais écarté.
Étage de croisière
[modifier | modifier le code]


L'étage de croisière est similaire à celui de MSL. C'est une structure cylindrique en aluminium de quatre mètres de diamètre et de faible hauteur d'une masse de 539 kg qui coiffe le reste de la sonde et supporte sur la partie opposée à celle-ci l'adaptateur permettant de solidariser MSL et son lanceur. Son rôle est de prendre en charge le transit de la sonde spatiale entre l'orbite terrestre et la banlieue de Mars. À l'approche de Mars, l'étage de croisière, qui achève sa mission et constitue désormais une masse pénalisante, est largué avant que le véhicule de rentrée n'entame la rentrée atmosphérique. L'étage de croisière effectue à l'aide de son système de propulsion les cinq à six corrections de trajectoire nécessaires pour que la sonde se présente à proximité de la planète Mars avec la vitesse et la position lui permettant d'effectuer un atterrissage de précision ; durant le transit de 8-9 mois entre la Terre et Mars, il assure la surveillance et la maintenance des équipements de l'ensemble de la sonde[75],[76].
Véhicule de rentrée
[modifier | modifier le code]La traversée de l'atmosphère martienne à une vitesse initiale atteignant 6 km par seconde provoque un échauffement important des parties externes de la sonde qui atteignent une température de 2 100 °C. Pour protéger l'astromobile durant cette phase, il est encapsulé dans un véhicule de rentrée. Celui-ci est composé d'un bouclier thermique avant, conçu pour résister à la forte chaleur que subit cette partie de la sonde, et d'un bouclier arrière, qui notamment contient le parachute. Le véhicule de rentrée a la forme d'une sphère-cône de demi-angle de 70° héritage du programme Viking repris sur tous les engins de la NASA envoyés à la surface de Mars par la suite. Par contre, la sonde innove avec des moteurs-fusées qui permettent de contrôler de manière active et non plus passive l'orientation du véhicule de rentrée jusqu'au déploiement du parachute afin de corriger les écarts par rapport à la trajectoire nominale et de permettre un atterrissage de précision. Le bouclier encapsule l'étage de descente et l'astromobile et est solidaire de l'étage de croisière durant le transit Terre-Mars.
Étage de descente
[modifier | modifier le code]L'étage de descente (le skycrane) est responsable de la dernière phase de la descente et dépose en douceur l'astromobile sur le sol martien. Une fois cette mission achevée, il reprend de la hauteur et va s'écraser à quelques centaines de mètres de l'astromobile. Pour réaliser sa mission, l'étage de descente comprend :
- huit moteurs-fusées (MLE ou Mars Lander Engines) d'une poussée unitaire modulable entre 400 et 3 060 newtons (de 13 à 100 %) ;
- huit petits moteurs-fusées responsables du contrôle de l'orientation (attitude) de la sonde ;
- un radar doppler en bande Ka (TDS ou Terminal Descent Sensor) comportant six antennes émettant autant de faisceaux sous différents angles développé par le JPL. Dès que le bouclier thermique est largué le radar va déterminer l'altitude de la sonde et sa vitesse par rapport au sol martien ;
- trois câbles reliés à un enrouleur (Bridle Umbilical Device ou BUD) et un cordon ombilical qui relient l'astromobile et l'étage de descente lorsque celui-ci dépose l'astromobile sur le sol martien.
- Composants de Mars 2020
-
 L'étage de croisière de Mars 2020 est similaire à celui de Mars Science Laboratory (représenté ici).
L'étage de croisière de Mars 2020 est similaire à celui de Mars Science Laboratory (représenté ici). -
 Vue du dessous de l'étage de descente sans le bouclier thermique avant.
Vue du dessous de l'étage de descente sans le bouclier thermique avant. -
 Mars 2020 complètement assemblée est préparée pour des tests acoustiques.
Mars 2020 complètement assemblée est préparée pour des tests acoustiques.



Astromobile Perseverance
[modifier | modifier le code]
L'astromobile Perseverance est inspiré de Curiosity mais comporte plusieurs différences portant sur les instruments embarqués, le bras (plus massif), la présence d'un espace de stockage des échantillons martiens, et les roues modifiées pour tenir compte des problèmes rencontrés par Curiosity. Ces modifications se traduisent par une masse sensiblement plus importante (1 025 kilogrammes contre 899 kg) et un châssis allongé de 3 centimètres. L'astromobile est long de 3 mètres (en ne prenant pas en compte le bras), large de 2,7 mètres et haut de 2,2 mètres[77],[78].
Suspension et roues
[modifier | modifier le code]Le rover doit parcourir un terrain accidenté parsemé de rochers, présentant parfois des pentes fortes et un sol dont la consistance, parfois sableuse, peut conduire à l'enlisement du véhicule et entraîner sa perte comme ce fut le cas pour Spirit. Le rover de Mars 2020, comme son prédécesseur Curiosity, peut s'aventurer sur des pentes à 45° sans se retourner (mais il est prévu d'éviter les pentes de plus de 30°). Il peut escalader des rochers ou franchir des trous d'une hauteur supérieure au diamètre de ses roues (52,5 cm). Pour y parvenir il utilise une suspension, baptisée rocker-bogie, mise au point par la NASA pour les rovers MER : celle-ci limite l'inclinaison de la caisse du rover lorsque celui-ci franchit un obstacle qui ne soulève qu'un seul des deux côtés. Ces suspensions sont constituées par des tubes en titane. Chacune des six roues de 52,5 cm de diamètre est constituée d'un cylindre creux en aluminium comportant sur sa surface externe 48 cannelures pratiquement droites (contre 24 pour Curiosity) pour une meilleure prise dans un sol mou ou sur des rochers présentant une face abrupte. Pour éviter les problèmes rencontrés par l'astromobile Curiosity (perforation des roues), la bande de roulement est deux fois plus épaisse. Les roues sont équipées chacune d’un moteur individuel. Chacune des quatre roues d'extrémité comporte un moteur agissant sur la direction ce qui permet au rover de pivoter sur place. Un tour de roue fait avancer le rover de 1,65 mètre. La vitesse maximale sur un terrain plat est de 4,2 centimètres par seconde soit 152 mètres par heure. À cette vitesse, les moteurs assurant la propulsion consomment 200 watts[79],[80].
Production d'énergie
[modifier | modifier le code]Le rover a besoin d'énergie pour faire fonctionner ses équipements ainsi que ses instruments, pour communiquer avec la Terre et pour que ses organes sensibles soient maintenus dans une plage de température acceptable. Cette énergie est fournie par un générateur thermoélectrique à radioisotope (ou GTR), le MMRTG développé par le DoE et produit par Boeing. Celui-ci utilise 4,8 kg de dioxyde de plutonium PuO2 enrichi en plutonium 238 générant une puissance initiale d'environ 2 000 W thermiques convertis nominalement en 120 W électriques par des thermocouples à base de matériaux thermoélectriques, à savoir PbTe/TAGS. Le rover dispose de 2,7 kWh/j. Cette puissance est indépendante de l'intensité du rayonnement reçu du Soleil et n'imposera donc pas d'arrêter la mission pendant l'hiver martien. Mars 2020 dispose d'une autonomie nominale d'une année martienne, soit près de deux années terrestres, mais sa source d'énergie devrait encore fournir 100 W électriques après 14 années terrestres de fonctionnement. L'électricité est stockée dans deux batteries rechargeables au lithium ion ayant chacune une capacité de 42 Ah. Un système de radiateurs comportant près de cinquante mètres de tubes dans lesquels circule un fluide caloporteur permet de rejeter la chaleur excédentaire. Le MMRTG est installé à l'extrémité arrière du rover d'où il émerge pour permettre au système de refroidissement d'être en contact avec l'atmosphère martienne. Il a un diamètre de 64 centimètres pour une longueur de 66 centimètres et sa masse est de 45 kilogrammes[Note 17],[81],[82].
- Le MMRTG
-
 Le radiateur sur lequel doit être fixé le MMRTG est visible sur cette amorce de l'arrière du rover.
Le radiateur sur lequel doit être fixé le MMRTG est visible sur cette amorce de l'arrière du rover. -
 Le MMRTG du rover de Mars 2020.
Le MMRTG du rover de Mars 2020.


Télécommunications
[modifier | modifier le code]
Pour transmettre les données scientifiques recueillies, les données de navigation et les données télémétriques sur son fonctionnement ainsi que pour recevoir les instructions mises au point par l'équipe sur Terre, le rover dispose de trois antennes qui fournissent une grande flexibilité opérationnelle tout en permettant de faire face à une panne d'un des systèmes. Ces antennes, qui sont fixées sur l'arrière du pont supérieur du rover, sont[83] :
- une antenne hélice quadrifilaire fonctionnant en bande UHF (environ 400 MHz) qui est utilisée pour les communications à courte portée avec les sondes spatiales en orbite autour de Mars. Le débit maximum est de 2 Mb/s dans le sens rover-satellite. C'est ce mode de communication qui est privilégié car les satellites sont fréquemment à portée d'antenne du rover : les orbiteurs de la NASA MAVEN, Odyssey et MRO ainsi que celui de l'Agence spatiale européenne ExoMars Trace Gas Orbiter disposent des équipements permettant de recevoir le signal du rover, de stocker les données puis de les retransmettre vers la Terre lorsque les stations terrestres sont en vue. Pour améliorer le débit des communications, l'orbite de MAVEN a été rapprochée de la surface de Mars (l'apogée passe de 6 200 à 4 500 km) au cours de l'année 2019 en utilisant la technique de l'aérofreinage[84].
- les deux antennes en bande X (7 à 8 GHz) sont utilisées pour les communications directes avec la Terre :
- l'antenne à grand gain en forme d'hexagone plat de 30 cm de diamètre permet des débits de 160-500 bits par seconde (antenne de réception de 30 m de diamètre) ou 800–3 000 b/s (antenne de 70 m.) Elle doit être orientée avec précision vers la Terre et dispose à cet effet d'un mécanisme fournissant deux degrés de liberté, ce qui permet de la tourner vers sa cible sans déplacer le rover. Elle a été développée par l'Espagne (EADS CASA ESPACIO).
- l'antenne à faible gain omnidirectionnelle n'a pas besoin d'être orientée mais son débit est limité à 10 b/s (antenne de réception de 30 m de diamètre) ou 30 b/s (antenne de 70 m).
Informatique embarquée
[modifier | modifier le code]Le rover dispose de deux ordinateurs identiques et redondants, baptisés RCE (Rover Compute Element), qui pilotent son fonctionnement. Un seul des deux ordinateurs est en activité à un moment donné. L'autre ordinateur est activé en cas de problème sur l'ordinateur actif. Chaque ordinateur est relié aux différents équipements par un réseau conforme aux standards de l'industrie aérospatiale c'est-à-dire répondant aux besoins de fiabilité des avions et des engins spatiaux. Les deux ordinateurs sont « radiodurcis » pour résister aux rayons cosmiques. Ils utilisent tous deux un microprocesseur RAD750 cadencé à 200 MHz. Chaque ordinateur comporte 256 kilooctets d’EEPROM, 256 mégaoctets de mémoire DRAM et 2 gigaoctets de mémoire flash. L'ordinateur assure plusieurs fonctions grâce à différents capteurs[85] :
- il utilise les données fournies par une centrale à inertie pour déterminer la position, les mouvements du rover dans les trois dimensions. Ces données sont traitées pour déterminer la trajectoire effectivement suivie ainsi que l'inclinaison du rover ;
- il collecte les données de différents capteurs pour déterminer l'état de santé du rover comme la température ou le niveau des batteries. En fonction par exemple de la température il met en marche des résistances chauffantes pour maintenir la température dans une plage de valeurs acceptable. Si l'énergie disponible est suffisante l'ordinateur lance des activités comme le transfert de données vers la Terre ou l'utilisation d'un instrument scientifique ;
- la prise de photos, la navigation sur le sol de Mars et l'utilisation des instruments résultent de l'interprétation par l'ordinateur des commandes transmises depuis la Terre ;
- le rover génère en permanence des données techniques, des télémesures et des rapports périodiques qui sont stockés pour transmission à la demande de l'équipe au sol.
Système de prélèvement et de stockage des échantillons
[modifier | modifier le code]Bras porte-outils
[modifier | modifier le code]L'astromobile de Mars 2020 dispose d'un bras (Robot Arm RA) fixé à l'avant du châssis et portant à son extrémité un ensemble d'outils utilisés pour analyser in situ des échantillons de sol et de roche : SHERLOC combine une caméra (WATSON), un laser et un spectromètre ultraviolet pour déterminer les composants minéraux et organiques tandis que PIXL, qui combine une caméra et un spectromètre de fluorescence X détermine les éléments chimiques présents. Le bras porte également un ensemble d'outils permettant de recueillir des carottes du sol : GDRT (Gaseous Dust Removal Tool) pour nettoyer la surface, un capteur de contact et une foreuse. Le bras est fixé sur la face avant du rover et est long de 2,1 mètres. Les outils situés au bout du bras peuvent être positionnés face à la zone à analyser, sans que le rover se déplace, grâce à plusieurs articulations motorisées qui fournissent 5 degrés de liberté[86].
Comme le bras de Curiosity, celui de Perseverance est conçu pour fonctionner malgré une amplitude thermique qui atteint 100 °C et qui affecte notamment la géométrie du bras et les mesures effectuées par les capteurs de force. Le système de forage et de récupération des carottes de sol est beaucoup plus sophistiqué que la foreuse de Curiosity et le bras doit supporter une masse d'équipements et d'instruments augmentée de 50 % (40 kilogrammes[56]) sans pour autant augmenter son propre poids. Alors que pour Curiosity les capteurs de force sont uniquement utilisés pour éviter de dépasser la résistance des équipements, ceux de Perseverance permettent de moduler la pression exercée par la foreuse et sont également utilisés pour effectuer les changements de foret[87].
Système de recueil et de stockage des échantillons de sol martien
[modifier | modifier le code]
Le système de collecte et de stockage des échantillons martiens représente plus de la moitié de la masse de la charge utile de l'astromobile. C'est un ensemble mécanique extrêmement complexe composé de trois robots. Sa conception a nécessité une longue mise au point pour garantir sa fiabilité et limiter la contamination des échantillons prélevés. Son rôle est de prélever par forage jusqu'à 43 carottes du sol (roche ou régolithe) du diamètre d'un crayon (13 millimètres) et de la moitié de sa longueur (60 millimètres). Celles-ci sont stockées dans des tubes qui sont scellés après remplissage et rangés dans un emplacement situé sous la partie avant du rover. Les tubes seront par la suite déposés dans un endroit identifié avec précision pour pouvoir être collectés par une mission de retour d'échantillons martiens qui reste à financer (début 2020). Pour collecter les échantillons, le sol est d'abord analysé à l'aide des instruments SHERLOC (spectromètre et caméra), WATSON (caméra à fort grossissement) et PIXL (spectromètre à rayons X fixés au bout du bras articulé. Un petit réservoir contenant de l'azote permet de produire un jet de gaz afin de chasser la poussière et les particules avant de procéder à une analyse à l'aide des instruments SHERLOC et PIXL. La foreuse va chercher un foret adapté au type de sol sur un carrousel mobile. Cet équipement est logé dans la partie avant de l'astromobile et fait partie d'un ensemble complexe baptisé Adaptive Caching Assembly (ACA). Le foret est creux et un bras long de 0,5 mètre (le Sample Handling Assembly ou SHA) disposant de trois degrés de liberté place dans celui-ci un tube qui sera rempli par la carotte de sol au moment du forage. La foreuse peut fonctionner selon deux modes : rotation ou rotation/percussion. Le forage permet d'obtenir un échantillon de sol de six centimètres de long et 1,3 centimètre de diamètre dont la masse est d'environ 10 à 15 grammes. Le foret est alors replacé sur le système de carrousel. Le bras SHA intervient alors pour effectuer les opérations de stockage définitif. Il extrait du foret creux le tube contenant l'échantillon de sol et le déplace vers un équipement responsable des opérations finales. Celui-ci mesure le volume de l'échantillon, prend une image de celui-ci, installe un bouchon destiné à limiter les mouvements de l'échantillon dans le tube puis scelle le tube et le range dans le système de stockage définitif. À la fin de la mission, c'est ce bras qui aura la responsabilité de déposer les tubes sur le sol pour constituer le dépôt récupéré ultérieurement par la mission ramenant ceux-ci sur Terre. Le système comprend également six tubes témoins qui contiennent des échantillons de sol terrestre stérilisés comme les tubes vides et qui sont exposés à l'atmosphère de Mars avant d'être scellés[88] ,[89] ,[90],[91],[92].
| Le système de collecte et de stockage des échantillons martiens |

|

|
Stérilisation
[modifier | modifier le code]Comme tous les engins envoyés vers le sol de Mars, la sonde spatiale Mars 2020 est débarrassée avant son lancement des micro-organismes qui pourraient venir contaminer la planète et ainsi compromettre l'étude scientifique de celle-ci. Cet objectif de protection planétaire est rempli par différentes mesures : assemblage de l'engin spatial en salle blanche qui limite la quantité de particules en suspension dans l'atmosphère, nettoyage régulier des surfaces et des sols avec des produits bactéricides, stérilisation thermique de certains composants qui sont portés jusqu'à des températures de 200 °C, port de combinaisons protectrices par les personnes responsables de l'assemblage de la sonde spatiale, etc. L'objectif fixé est que l'ensemble des composants atteignant le sol de Mars ne contienne pas plus de 300 000 spores de bactéries et que l'astromobile proprement dit ne comporte pas plus de 41 000 spores. D'autre part la trajectoire initiale de la sonde spatiale ne vise pas Mars de manière que le deuxième étage du lanceur qui suit une trajectoire parallèle ne vienne pas s'écraser sur le sol martien. Par ailleurs le site d'atterrissage choisi ne doit pas comporter de réservoirs de glace d'eau à une profondeur inférieure à 5 mètres pour éviter la propagation des bactéries transportées[93].
Une contrainte supplémentaire résulte du fait que les échantillons de sol martien doivent être ramenés sur Terre pour une analyse scientifique approfondie et la recherche de traces de vie passées. Les composants impliqués dans la collecte des échantillons et leur stockage subissent une stérilisation plus poussée. Les mécanismes impliqués directement dans le stockage sont isolés de l'extérieur par un couvercle qui se détache uniquement lorsque l'astromobile est arrivée sur Mars. Des tubes témoins permettent de mesurer l'environnement de cet équipement y compris les traces de contamination antérieure au lancement. L'état de stérilisation des différents composants impliqués est documenté de manière détaillée[93].
Instrumentation scientifique
[modifier | modifier le code]L'instrumentation scientifique est en partie différente de celle de Mars Science Laboratory. Les instruments embarqués doivent permettre des mesures plus précises dans plusieurs domaines[94],[95] :
- les instruments des astromobiles lancés jusque-là fournissent la composition moyenne minéralogique et chimique des roches sur une surface de plusieurs centimètres carrés. L'instrumentation de l'astromobile de Mars 2020 doit permettre de mettre en évidence les structures géologiques à petite échelle qui fournissent des informations importantes dans la recherche des signatures biologiques ;
- l'instrument SAM d'analyse des composants organiques embarqué sur l'astromobile MSL/Curiosity analyse des échantillons martiens qui doivent être au préalable broyés et tamisés ce qui fait disparaître des données importantes sur leur texture. La mission Mars 2020 doit pouvoir effectuer des observations avec une résolution spatiale suffisamment fine pour permettre de mettre en évidence des structures telles que celles que pourrait créer une vie microbienne.
Instruments sélectionnés
[modifier | modifier le code]La communauté scientifique et la NASA ont fait le pari qu'une mission de retour d'échantillons martiens sera finalement programmée et budgétée : ils ont choisi de retenir, non pas des instruments capables de faire les analyses les plus poussées, mais ceux capables d'identifier de la manière la plus efficace les portions de sol les plus intéressantes pour une analyse ultérieure sur Terre. Alors que Curiosity emportait deux laboratoires (SAM et CheMin) permettant une analyse sur place, l'astromobile de Mars 2020 n'en emporte aucun : le mini-laboratoire CODEX, bien que très prometteur, n'a pas été retenu. La moitié de la charge utile est réservée au système de prélèvement et de stockage des échantillons. Le reste de la charge utile comprend six instruments scientifiques et deux expériences technologiques. Certains des instruments ont été sélectionnés pour permettre l'identification rapide de la composition du sol (une information pouvant nécessiter plus d'un mois pour Curiosity). Il s'agit d'obtenir dans un délai relativement court (les contraintes temporelles sont la durée de vie de l'astromobile, le temps de déplacement de celui-ci d'une zone à l'autre et l'arrivée de la mission chargée de ramener les échantillons sur Terre) 43 carottes de sol bien choisis :

- Trois instruments sont chargés de fournir une vue d'ensemble du site[90],[91] :
- Mastcam-Z est une caméra à deux objectifs constituant une évolution de la Mastcam embarquée sur Curiosity. La principale amélioration est constituée par l'ajout d'un zoom (objectif de 28-100 mm),
- SuperCam est une version améliorée de l'instrument franco-américain ChemCam, auquel ont été ajoutés des spectromètres Raman et infrarouge,
- le radar RIMFAX (Radar Imager for Mars Subsurface Exploration) permet de compléter les analyses effectuées par SuperCam qui ne peut étudier que la surface des roches. RIMFAX permet d'analyser les couches géologiques enfouies jusqu'à une profondeur de 500 mètres avec une résolution comprise entre 5 et 20 cm.
- Les principaux instruments scientifiques de l'astromobile sont les deux instruments installés au bout du bras de l'astromobile pour venir au contact d'une roche visée : PIXL et SHERLOC[31]. Ils sont utilisés pour réaliser une étude plus poussée d'un échantillon de la taille approximative d'un timbre. Leurs capacités sont nettement améliorées par rapport aux instruments embarqués sur Curiosity (microscope et spectromètre à rayons X). Ces deux instruments disposent d'un microscope et, alors que le spectromètre X de Curiosity ne pouvait effectuer qu'une mesure pondérée de la surface de l'échantillon, les deux nouveaux instruments réalisent plusieurs centaines à plusieurs milliers de mesures permettant d'identifier les différences de composition à l'échelle du grain de sable. Cette capacité peut fournir un éclairage décisif sur l'histoire de la formation des roches analysées. Ces instruments sont également capables d'identifier et de cartographier la présence de matériaux organiques en fournissant des résultats plus facilement interprétables que les instruments de Curiosity. Ces deux instruments sont[90],[91] :
- le spectromètre de fluorescence des rayons X : PIXL (Planetary Instrument for X-ray Lithochemistry),
- le spectromètre SHERLOC.
| Instrument | Type instrument | Objectifs | Principales caractéristiques | Responsable / Laboratoire / Pays | Masse | Consommation électrique |
Volumes données en sortie |
|---|---|---|---|---|---|---|---|
| Mastcam-Z[96] | Caméra couleur (photos et vidéos) avec un zoom | Prise d'images tridimensionnelles et de vidéos du sol et du ciel | 1 600 × 1 200 pixels Résolution spatiale : 150 micromètres à 7,4 mm selon la distance |
Jim Bell | 4 kg | 17,4 watts | 148 mégabits par jour |
| MEDA[97] | Station météorologique | Mesure des températures, pression atmosphérique, taux d'humidité, radiations, taille et quantité poussière, vent, rayonnement infrarouge infrarouge | Jose A. Rodriguez Manfredi | 5,5 kg | 17 watts | 11 mégaoctets par jour | |
| PIXL[98] | Spectromètre rayons X | Composition chimique des roches avec une résolution élevée | 1 600 × 1 200 pixels Résolution spatiale : 150 micromètres à 7,4 mm selon la distance |
Jose A. Rodriguez Manfredi | 6,5 kg | 25 watts | 16 mégabits par jour |
| RIMFAX[99] | Radar | Structure géologique du sous-sol | Jusqu'à 10 mètres de profondeur Résolution verticale : 15 à 30 centimètres |
Svein-Erik Hamran | 3 kg | 5 à 10 watts | 5 à 10 kilooctets par site étudié |
| SHERLOC[100] | Spectromètre, laser et caméra (contexte) | Détection des minéraux, molécules organiques et signatures de micro-organismes avec une résolution élevée | Résolution : laser 50 micromètres, caméra 30 micromètres Champ de vue : caméra 2,3 × 1,5 cm spectromètre 7 × 7 mm |
Luther Beegle | 4,7 kg | 49 watts | 80 mégabits (brut) par jour |
| SuperCam[101] | Spectromètre, laser et caméra (contexte) | Composition chimique (atomique et moléculaire) des roches et des sols | Spectroscopie LIBS (portée 7 mètres) Spectroscopie Raman et de luminescence Spectromètre infrarouge |
Roger Wiens | 10,6 kg | 17,9 watts | 15,2 mégabits par jour |
| MOXIE[102] | Équipement ISRU | Production d'oxygène à partir de l'atmosphère martienne (prototype) | Production de 10 grammes par heure | Michael Hecht | 17,1 kg | 300 watts |
Caméras
[modifier | modifier le code]La sonde spatiale embarque 23 caméras utilisées pour la navigation, les travaux scientifiques et la maintenance[103]. L'astromobile emporte 19 caméras : neuf en couleurs pour ingénierie, trois dont deux en couleur pour filmer la phase de descente dans l'atmosphère et d'atterrissage et réaliser un atterrissage de précision, les deux caméras couleurs avec zoom de l'instrument Mastcam-Z, la caméra couleur RMI de l'instrument SuperCam, les deux caméras couleurs de l'instrument SHERLOC, la caméra blanc et noir de l'instrument PIXL et la caméra noir et blanc de l'instrument MEDA). Le bouclier arrière emporte trois caméras couleur pour filmer le déploiement du parachute. L'étage de descente emporte une caméra couleur tournée vers le sol qui filme l'astromobile vu du dessus. L'hélicoptère Ingenuity emporte une caméra couleur qui fournit des images de la surface et une caméra noir et blanc pour la navigation[104].

| Utilisation | Désignation | Nombre de caméras | Couleur/N&B | Pixels | Autre caractéristique | Localisation |
|---|---|---|---|---|---|---|
| Caméras d'ingénierie (9 installées sur l'astromobile) | ||||||
| Caméra utilisée pour la navigation | Navcam | 2 | Couleur | 20 mégapixels | Au sommet du mât. | |
| Caméra de détection des obstacles | Hazcam | 6 | Couleur | 20 mégapixels | Objectif fisheye | 4 à l'avant 2 à l'arrière. |
| Caméra du système de stockage des échantillons | CacgeCam | 1 | Couleur | 20 mégapixels | Dans le système de stockage des échantillons | |
| Caméras utilisées durant la phase d'atterrissage (7) | ||||||
| Caméras de surveillance des parachutes | PUC | 3 | Couleur | 1,3 mégapixels | Bouclier thermique arrière. | |
| Caméra de suivi de la descente pointée vers le sol | DDC | 1 | Couleur | 3,1 mégapixels | Étage de descente | |
| Caméra d'astromobile pointée vers le zénith | RUC | 1 | Couleur | 1,3 mégapixels | Sur le pont supérieur de l'astromobile | |
| Caméra d'astromobile pointée vers le sol | RDC | 1 | Couleur | 1,3 mégapixels | Sous l'astromobile au coin gauche avant | |
| Caméra du système d'atterrissage de précision (LVS) | LCAM | 1 | Noir et blanc | 1,3 mégapixels | Sous l'astromobile au coin droit avant | |
| Caméras scientifiques (7 installées sur l'astromobile) | ||||||
| Caméras de Mastcam-Z | ZCAM | 2 | Couleur | 2 mégapixels | Zoom, stéréo | A gauche et à droite de la tête du mât. |
| Caméra de Supercam | RMI | 1 | Couleur | 4 mégapixels | Tête du mât. | |
| Caméras de SHERLOC | WATSON et ACI | 2 | Couleur et N&B | 2 mégapixels | Au bout du bras. | |
| Caméra de PIXL | MCC | 1 | N&B et couleur (partiel) | 43 mégapixels | Au bout du bras. | |
| Caméra de MEDA | SkyCam | 1 | N&B | ~1 mégapixels | Objectif fisheye | Sur le pont de l'astromobile. |
Caméra Mastcam-Z
[modifier | modifier le code]
La caméra principale est la Mastcam-Z. Il s'agit d'une version améliorée de la caméra équipant Curiosity car elle embarque un zoom permettant un grandissement x3, abandonné en cours de développement pour son prédécesseur. La caméra effectue des images en couleurs panoramiques, tri-dimensionnelles et, grâce au zoom, peut effectuer des photos détaillées. Elle comprend deux objectifs distincts écartés de 24,2 centimètres qui permettent des photos stéréo et sont fixés au sommet d'un mât à deux mètres de hauteur. Le capteur CCD, identique à celui de Curiosity, dispose de 2 mégapixels (1 600 × 1 200). L'ensemble a une masse de 4 kilogrammes et consomme 17,4 watts[106]. Le responsable scientifique de l'instrument est Jim Bell de l'université de l'Arizona. L'instrument est développé par Malin Space Science Systems[107].
Le zoom est un objectif 28-100 mm (grand angle à téléobjectif modéré) et l'ouverture est comprise entre f/8 et f/10 (téléobjectif). Le champ de vue est de 23° x 18° (grand angle) et de 6° x 5° (téléobjectif). Le pouvoir de résolution de la caméra est d'environ 1 millimètre dans la zone accessible par le bras télécommandé de l'astromobile et quelques centimètres à une distance de 100 mètres. Elle est équipée de 11 filtres étroits dans la bande spectrale comprise entre 400 et 1 000 nanomètres qui permettent de déterminer si les matériaux photographiés ont été altérés ou érodés et qui fournissent des informations importantes sur la composition des roches. Une paire de filtres permet d'effectuer des images du Soleil.
La caméra peut réaliser des films avec une vitesse de quatre images par seconde. Cette fréquence peut être augmentée en diminuant la définition. Cette fonction permet d'observer des phénomènes comme les tourbillons de poussière, le déplacement des nuages, les phénomènes astronomiques mais également le déroulement des opérations réalisées par l'astromobile telles que les déplacements, la collecte d'échantillon ou le stockage de ceux-ci[108].
- Les capteurs de MEDA et la caméra SkyCam
-
 Schéma d'une caméra Mascam-z
Schéma d'une caméra Mascam-z -
 Cibles utilisées pour étalonner la caméra Mastcam-z
Cibles utilisées pour étalonner la caméra Mastcam-z


Spectromètre imageur SuperCam
[modifier | modifier le code]

La SuperCam est une version fortement améliorée de l'instrument franco-américain ChemCam embarqué sur l'astromobile Curiosity. Elle utilise un laser et trois spectromètres pour analyser à distance la composition élémentaire et minérale des roches ciblées. Le laser pulsé tire sur la roche à analyser provoquant la vaporisation de sa couche superficielle et générant un plasma. L'optique de 110 mm utilisée pour viser la cible avec le laser, un télescope de type Schmidt-Cassegrain, permet de recueillir l'image renvoyée de l'étincelle de plasma, et de la transmettre par fibre optique aux spectromètres. L'instrument a été conçu et réalisé conjointement par le LANL américain et le CNES français. L'instrument est capable d'effectuer quatre types de mesure[109],[110] :
- de la spectroscopie LIBS version améliorée de cette fonction de Curiosity. L'instrument utilise le laser dans la longueur d'onde 1 064 nm (rouge) pour, in fine, identifier et quantifier les éléments chimiques présents dans la roche à une distance allant jusqu'à 7 mètres. Le spectromètre analyse la lumière de l'excitation rayonnée, dans la gamme du visible, débordant largement dans l'ultraviolet d'un côté, et de l'autre, dans la gamme dite du proche infra-rouge, au total, une bande spectrale allant de 240 nm (UV) à 850 nm (proche infra-rouge), et ce avec une résolution variable allant de 0,09 à 0,30 nm. À l'issue de la mesure physique, une chaîne de traitement des données spectrales fournit une composition dite élémentaire, le plus souvent en termes de pourcentages pondéraux des divers oxydes d'éléments chimiques, selon l'usage en pétrologie ;
- spectroscopie Raman : l'instrument utilise le laser dans la longueur d'onde 532 nm (vert) pour faire vibrer les molécules. Une faible fraction de la lumière interagit avec les molécules et change de longueur d'onde. Ce « signal Raman » est très faible et il faut l'intensifier. Il est analysé par le spectromètre et permet d'identifier les minéraux et les molécules présentes dans la cible. L'information fournie est complémentaire de celle produite par le spectromètre infrarouge décrit ci-dessous. Pour ce type d'analyse la portée du laser est de 12 mètres ;
- Spectroscopie infrarouge de réflectance (passive) (instrument fourni par le Laboratoire d'études spatiales et d'instrumentation en astrophysique) qui exploite la lumière réfléchie par la lumière sur le terrain (il n'analyse pas le plasma généré par les impacts laser) fournit des spectres en lumière visible-proche infrarouge (400-900 nm) et en proche infrarouge (1,3-2,6 micromètres) qui permettent d'identifier en particulier les argiles. Le spectre est obtenu à l'aide d'un filtre à dispersion acousto-optique dérivé des instruments CRISM (Mars Reconnaissance Orbiter) et OMEGA (Mars Express). La portée est de 10 kilomètres ;
- une caméra en couleurs à résolution spatiale élevée, placée derrière le télescope, fournit une image microscopique plurifocalisée centrée sur la zone visée par le laser. L'image permet de déterminer le contexte géologique des données collectées en fournissant la texture de la roche et dans le cas d'un sol, des paramètres comme son hétérogénéité, sa structure et sa cohésion. La caméra dispose d'un autofocus et permet de prendre des images jusqu'à l'infini.
Deux autres équipements fournissent des données qui viennent compléter les données recueillies :
- un microphone est disposé sur la tête optique au sommet du mât du rover. Mars Microphone enregistre, entre autres, les sons de claquage des étincelles des plasmas produits par le laser qui permettent d'en déduire différents paramètres physiques venant ainsi améliorer l'analyse des spectres LIBS. Ces sons, souvent appelés de manière imagée « impacts laser », sont audibles jusqu'à une distance de 4 mètres[111] ;
- une quarantaine de cibles sont utilisées pour étalonner les différents sous-systèmes de l'instrument. Elles sont montées sur une plaque de titane, située à gauche du générateur d'électricité (RTG) sous l'une des antennes principales de communication.
SuperCam a une masse totale de 10,6 kg répartie entre le module optique logé dans le mât (5,6 kg), les spectromètres logés dans le corps de l'astromobile (4,8 kg) et les cibles utilisées pour étalonner l'instrument (0,2 kg). L'instrument en fonctionnement consomme 17,9 watts. Il génère un volume de données moyen de 4,2 mégabits par jour. L'instrument est développé par le Laboratoire national de Los Alamos qui fournit les spectromètres et l'institut de recherche en astrophysique et planétologie (IRAP) de l'université Paul Sabatier de Toulouse en France qui livre la partie optique ainsi que le laser (fourni par Thales) sous maîtrise d'œuvre de l'agence spatiale française (CNES). Le responsable scientifique est Roger Wiens de Los Alamos et son adjoint Sylvestre Maurice de l'IRAP[112],[113].
Radar RIMFAX
[modifier | modifier le code].jpg)
Le radar RIMFAX (Radar Imager for Mars Subsurface Exploration) développé par un institut de recherche norvégien. Il permet de compléter les analyses effectuées par SuperCam qui ne peut étudier que la surface des roches. RIMFAX permet d'analyser les couches géologiques enfouies jusqu'à une profondeur de 500 mètres avec une résolution verticale comprise entre 15 et 30 centimètres. Il est constitué d'un radar qui émet dans des fréquences modifiables (comprise entre 150 et 1 200 mégahertz) pour tenir compte de la nature du terrain. L'instrument analyse les ondes réfléchies par les couches superficielles de la surface (jusqu'à 10 mètres de profondeur), ce qui permet de détecter la présence de glace, de roche, de sable et d'eau liquide. Ces sondages sont effectués au fur et à mesure de l'avancement de l'astromobile tous les 10 centimètres. L'instrument permet de déterminer l'épaisseur du régolithe, détecter les différentes strates superficielles du terrain situées sous la surface et associées aux structures qui en émergent, associer une section stratigraphique aux échantillons qui sont prélevés[114],[115],[116].
Chaque sondage produit 5 à 10 kilooctets de données. L'instrument est composé d'une antenne fixée sous le RTG et d'un boîtier électronique placé dans le corps de l'astromobile tout à l'arrière. Sa masse est de 3 kilogrammes et il consomme de 5 à 10 watts en fonctionnement. Le responsable scientifique de RIMFAX est le chercheur norvégien Svein-Erik Hamran qui est également un des deux responsables scientifiques du radar WISDOM embarqué à bord de l'astromobile ExoMars de l'Agence spatiale européenne qui doit atterrir sur Mars à la même époque que Mars 2020[114],[117].
Spectromètre PIXL
[modifier | modifier le code]

Le PIXL (Planetary Instrument for X-ray Lithochemistry) est un spectromètre de fluorescence des rayons X qui détermine les éléments chimiques présents dans un échantillon de roche à l'échelle d'un grain de sel (0,1 millimètre ou 100 micromètres) et grâce à une caméra associe cette composition à la texture fine de la roche. L'instrument est monté à l'extrémité du bras de l'astromobile. Le principe de fonctionnement repose sur l'émission d'un rayonnement X qui est focalisé par une optique constituée de millions de fibres optiques de manière à frapper l'échantillon à analyser sur un rayon réduit à 100 micromètres (0,1 millimètre). Le spectre des photons X renvoyés par la cible (fluorescence) est fourni par un détecteur à dérive en silicium (SDD). Pour pouvoir associer l'analyse spectrale effectuée à une texture donnée et localisée de la roche, une caméra co-alignée prend une image (26 × 36 millimètres) de la cible avec une résolution spatiale de 50 micromètres. Un petit projecteur de type DEL projette une grille visible sur les images prises pour fournir un cadre de référence. Pour réaliser l'analyse d'une roche, la tête de l'instrument est positionnée par le bras de l'astromobile à 2 centimètres de sa cible. Le capteur est positionné au-dessus de sa cible grâce à 6 petits vérins qui permettent de le déplacer lentement avec une très grande précision. Un spectre est obtenu en 5 à 10 secondes. En 10 à 20 minutes, l'instrument effectue l'analyse d'une centaine de particules de la taille d'un grain de sable. PIXL peut mesurer les 16 éléments chimiques couramment détectés par ce type d'instrument mais également V, Co, Cu, Ga, As, Rb, Sr, Y, Zr et Ce. Il peut détecter un élément présent à hauteur de 10 parties par million[118],[119].
PIXL envoie environ 16 mégabits de données à chaque analyse. L'instrument a une masse totale d'environ 7 kilogrammes dont 4,3 kg pour le capteur monté au bout du bras, 2,6 kg pour l'électronique installée dans le corps de l'astromobile et 0,15 kg pour les cibles utilisées pour étalonner PIXL. L'ensemble consomme 25 watts lorsqu'il est mis en œuvre. La responsable scientifique de l'instrument est Abigail Allwood du Jet Propulsion Laboratory. Le développement de l'instrument est également effectué sous la maîtrise d'œuvre de cet établissement de la NASA[118],[120],[121].

Spectromètre SHERLOC
[modifier | modifier le code]

Le spectromètre SHERLOC (Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals) est un instrument situé à l'extrémité du bras de l'astromobile qui fournit des images à faible échelle et utilise un laser ultraviolet pour déterminer la minéralogie et la composition organique du sol martien afin de déterminer si ceux-ci ont été altérés par un environnement aqueux et s'ils contiennent des indices d'une vie microbienne passée. Il s'agit du premier spectromètre Raman œuvrant à la surface de Mars. L'instrument met en œuvre deux types d'effet. D'une part la fluorescence qui permet d'identifier les formes condensées du carbone et les composés aromatiques présents à hauteur d'une partie par million avec une résolution spatiale de 100 micromètres. D'autre part la diffusion Raman permet l'identification et la classification des composés aromatiques et aliphatiques présents avec une concentration comprise entre 1 % et 1 partie par 10 000 avec une résolution spatiale de 100 micromètres. La diffusion Raman permet également l'identification et la classification des minéraux issus d'une chimie aqueuse dans des grains dont la taille peut descendre jusqu'à 20 micromètres. L'instrument utilise un laser émettant un faisceau large de 50 micromètres dans l'ultraviolet (248,6 nanomètres) et une caméra dont la résolution spatiale est de 30 micromètres. Un système d'autofocus permet de positionner la tête de l'instrument à la distance adéquate de l'échantillon à analyser sans avoir à déplacer le bras. La caméra peut être également utilisée pour étudier les parois du forage. Un miroir pivotant permet de déplacer le point d'impact du laser et ainsi d'analyser de manière systématique une région de 0,7 × 0,7 centimètre. La caméra fournit le contexte avec un champ de vue de 2,3 × 1,5 centimètres[122].
L'instrument SHERLOC inclut également la caméra WATSON pouvant prendre des images à faible distance jusqu'à l'infini qui est utilisée aussi bien pour effectuer des vérifications d'ordre technique qu'à des fins scientifiques. WATSON dérive de la caméra MAHLI installée sur le bras de l'astromobile Curiosity[122]. À l'avant du rover Perseverance est fixée une cible permettant d'étalonner à la fois la caméra et le fonctionnement du spectromètre grâce à six échantillons, notamment de roches. La cible comprend également six échantillons de tissus (vectran, dacron, teflon...) qui serviront à effectuer des opérations d'étalonnage et à mesurer la résistance dans le temps de futures combinaisons spatiales[123]. La masse totale de l'instrument est de 4,7 kilogrammes répartis entre le capteur situé en bout de bras (3,11 kg) et l'électronique située dans le corps de l'astromobile (1,61 kg). Le spectromètre consomme 48,8 watts lorsqu'elle fonctionne dont 32,2 watts au niveau du détecteur. Le responsable scientifique est Luther Beegle du Jet Propulsion Laboratory[124],[125],.
Station météorologique MEDA
[modifier | modifier le code]
Comme Curiosity, Mars 2020 emporte une station météorologique développée par la même équipe espagnole et baptisée MEDA (Mars Environmental Dynamics Analyzer). Celle-ci est équipée de capteurs mesurant six paramètres atmosphériques - température au sol, température de l'air, pression, humidité, direction et vitesse des vents et rayonnement dans différentes bandes spectrales en ultraviolet, visible et infrarouge - ainsi que les propriétés optiques de la poussière, caractéristiques de la poussière. L'ensemble formé par les capteurs et l'électronique associée représente une masse de 5,5 kilogrammes et consomme jusqu'à 17 watts. Les capteurs sont répartis à différents endroits de l'astromobile[126],[127] :
- les cinq capteurs de température de l'air ATS (Air Temperature Sensors) sont montés sur le mât pour trois d'entre eux et sur le corps de l'astromobile pour deux autres. Ils sont fixés sur des supports non conducteurs qui les maintiennent à une certaine distance de l'astromobile afin ne pas subir l'influence thermique de celui-ci. Ils mesurent la température dans une plage comprise entre 150 et 300 kelvins (-123 à +26,8 °C) avec une précision de 5 kelvins et une résolution de 0,1 kelvin ;
- un hygromètre HS (Humidity Sensor) mesure le taux d'humidité. Il est fixé à l'intérieur du corps de l'astromobile pour être à l'abri de la poussière. Sa précision est de 10 % lorsque la température est comprise entre 200 et 323 kelvins ;
- un baromètre PS (Pressure Sensor ) fixé à l'intérieur du corps de l'astromobile et relié à l'extérieur par un tube mesure la pression extérieure. Il mesure des pressions comprises entre 1 et 1 150 pascals avec une précision en fin de vie de 20 pascals et une résolution de 0,5 pascal ;
- le rayonnement et la présence de poussière sont mesurés à l'aide de plusieurs capteurs et d'une caméra formant la suite RDS (Radiation and Dust Sensor) ;
- le rayonnement thermique est mesuré à l'aide de 5 capteurs infrarouges TIRS (Thermal InfraRed Sensor) fixés sur le côté droit de l'astromobile. Trois sont pointés vers le haut et deux sont pointés vers le sol ;
- deux ensembles de capteurs WS (Wind Sensors) mesurent la direction et la vitesse du vent.
- Les capteurs de MEDA et la caméra SkyCam
-
 Un des deux capteurs de vent WS (vitesse, direction) fixé sur le mât.
Un des deux capteurs de vent WS (vitesse, direction) fixé sur le mât. -
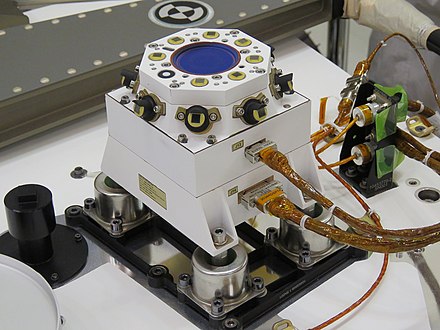 A la périphérie et sur le dessus de ce boitier fixé sur le pont de l'astromobile se trouvent 16 photodiodes mesurant la poussière présente dans l'atmosphère (capteur RDS). Au centre du boitier l'optique de la caméra SkyCam. Le tube noir à gauche du boitier est l'orifice du capteur de pression PS.
A la périphérie et sur le dessus de ce boitier fixé sur le pont de l'astromobile se trouvent 16 photodiodes mesurant la poussière présente dans l'atmosphère (capteur RDS). Au centre du boitier l'optique de la caméra SkyCam. Le tube noir à gauche du boitier est l'orifice du capteur de pression PS.


Expériences technologiques
[modifier | modifier le code]Utilisation de ressources in situ : l'expérience MOXIE
[modifier | modifier le code]
L'astromobile emporte également l'expérience de démonstration technologique MOXIE (Mars OXygen ISRU Experiment). Cet équipement expérimental de type ISRU (c'est-à-dire utilisation de ressources in situ) teste la production d'oxygène à partir du dioxyde de carbone présent dans l'atmosphère martienne. Ce type d'équipement, dont la première phase opérationnelle a été réalisée avec succès le mardi 20 avril 2021 en produisant près de 5 grammes d'oxygène[128] a permis pour la première fois la transformation d'une ressource naturelle ailleurs que sur Terre. L'expérience ouvre la voie à de futures missions martiennes, robotiques ou habitées, qui reconstitueront leurs réserves d'oxydant à partir de substances disponibles localement avant de décoller vers la Terre. L'oxygène ainsi récupéré pourrait également servir à constituer des réserves utilisables par de futurs astronautes. Toutefois, de nombreux défis technologiques de taille restent encore à résoudre pour stocker en quantité suffisante (sous forme comprimée ou liquide ?) l'oxygène produit.
L'appareil doit également permettre de déterminer la taille et la morphologie des grains de poussière en suspension dans l'atmosphère martienne[129],[90],[91].
L'oxygène est produit par le MOXIE en captant le dioxyde de carbone (CO2) de l'atmosphère martienne puis en rompant cette molécule pour produire de l'oxygène (O2) d'une part et du monoxyde de carbone (CO) d'autre part. L'atmosphère martienne est aspirée dans l'instrument, filtrée et puis comprimée à une pression de 1 bar. La molécule de dioxyde de carbone est "cassée" dans le module SOXE (Solid OXide Electrolyzer) par voie electrolytique. La température est portée à 800 °C. Pour produire de l'oxygène, le MOXIE doit fonctionner 2 heures en consommant une puissance électrique de 300 watts. Il produit 10 grammes d'oxygène par heure. Le responsable scientifique de l'expérience est Michael Hecht du Massachusetts Institute of Technology[130],[131].
- L'instrument MOXIE
-
 Principaux composants de MOXIE.
Principaux composants de MOXIE. -
 L'instrument MOXIE est installé dans l'astromobile.
L'instrument MOXIE est installé dans l'astromobile.


Hélicoptère de reconnaissance MHS
[modifier | modifier le code]
L'astromobile emporte un petit hélicoptère expérimental MHS (Mars Helicopter Scout), baptisé Ingenuity, qui est le premier engin volant utilisé sur une autre planète. Il ne joue aucun rôle dans la réalisation des objectifs scientifiques de la mission. Il s'agit d'un démonstrateur technologique qui doit permettre de vérifier le potentiel de ce type de véhicule dans un environnement peu propice au fonctionnement d'un engin volant du fait de l'atmosphère extrêmement ténue (portance faible), de l'éloignement de Mars qui ne permet pas un contrôle par un téléopérateur et des températures extrêmes[132],[Note 18].
Pesant environ 1,8 kilogramme l'hélicoptère effectuera plusieurs vols de reconnaissance en début de mission pour tester ses capacités puis sera abandonné. L'hélicoptère est fixé sous l'astromobile avant son déploiement sur le sol de Mars. Il se déplace dans les airs grâce à deux rotors bipales tournant en sens contraire. Leur vitesse de rotation est comprise entre 2 400 et 2 900 tours par minute soit 10 fois celle d'un hélicoptère sur Terre, pour pouvoir être efficace dans l'atmosphère particulièrement peu dense de Mars (équivalent à l'atmosphère terrestre à une altitude de 25 kilomètres). Le fuselage de l'hélicoptère a le diamètre d'un ballon de basket (13,6 × 19,5 cm). Le rotor mesure 1,2 m d'une extrémité à l'autre et la hauteur totale de l'hélicoptère est de 0,8 m. Quatre pieds longs de 0,384 m maintiennent le corps de l'hélicoptère à 0,13 m au-dessus du sol.
L'hélicoptère martien est propulsé par l'énergie électrique fournie par une batterie lithium-ion. Celle-ci est rechargée par des cellules solaires qui permettent en une journée d'accumuler une énergie suffisante pour effectuer un vol de 90 secondes (puissance moyenne consommée en vol : 350 Watts). Des résistances chauffantes maintiennent les systèmes à une température compatible avec les contraintes de fonctionnement.
L'hélicoptère emporte une caméra de navigation qui fournit des images en blanc et noir et une caméra couleur à haute résolution pour effectuer des prises d'images du terrain et ainsi remplir les objectifs qui lui sont assignés. Compte tenu du délai des échanges avec la Terre (16 minutes pour un échange dans la configuration Terre-Mars la plus favorable), l'hélicoptère vole de manière autonome à partir d'instructions transmises avant le vol. Un système radio embarqué reçoit ces commandes et transmet les images et télémesures via les équipements radio de l'astromobile[133],[20],[134].

Enregistrement des sons sur Mars
[modifier | modifier le code]L'atterrisseur InSight est le premier à avoir enregistré des sons sur Mars. Deux missions de la NASA équipées d'un système d'enregistrement des sons avaient été lancées par le passé : la sonde spatiale Mars Polar Lander lancée 1999 a été perdue du fait d'une erreur de conception peu avant son atterrissage sur Mars tandis que le microphone de Phoenix, qui s'était posée sur un des pôles de Mars en 2008, n'a jamais pu fonctionner.
La mission Mars 2020 emporte deux microphones :
- l'un d'eux doit fournir la bande sonore accompagnant le film des deux caméras chargées de filmer la phase finale de la descente vers la surface de Mars ;
- le second microphone est couplé avec la caméra couleur SuperCam. Il permettra l'enregistrement sonore des impacts du laser infrarouge de SuperCam mais également tous les bruits produits par les mécanismes de l'astromobile Perseverance (rotation de la tourelle, bruit de roulement, etc.), ce qui devrait contribuer à établir les diagnostics en cas de dysfonctionnement. Enfin, ce micro permettra également d'enregistrer les sons de la planète Mars s'ils sont transmis par l'atmosphère très ténue (vent, tonnerre).
L'instrument, qui ne fait pas partie de la charge utile scientifique, a été financé par l'association The Planetary Society et est identique au modèle lancé en 1999 déjà sponsorisé par cette association. Constitué principalement d'une carte électronique, il pèse environ 50 grammes[135].
Retour des échantillons sur Terre
[modifier | modifier le code]

Mars 2020 est la première étape du programme devant ramener les échantillons sur Terre Mars Sample Return. La deuxième partie de ce programme, qui constitue un défi technique, est (situation en octobre 2021) en cours de conception avec un objectif de lancement programmé en 2026 et un retour sur Terre prévu en 2031.
Selon le scénario détaillé en avril 2020, deux sondes spatiales développées respectivement par la NASA et l'Agence spatiale européenne doivent être lancées en 2026 dans le but de récupérer les échantillons de sol déposés sur Mars par l'astromobile Perseverance et les ramener sur Terre en 2031[136]. En 2018 la phase de spécifications des deux missions démarre à l'Agence spatiale européenne et à la NASA[137]. Airbus Defence and Space a été sélectionné par l'ESA pour le développement de la mission qui lui est impartie[138]. Des fonds sont débloqués pour réaliser ces études mais les deux agences n'ont pas le budget pour les implémenter.
Ces deux missions chargées de la suite du programme sont, d'une part, SRL qui doit aller chercher les échantillons sur le sol martien (rover SFR) et les ramener sur une orbite martienne (fusée MAV) et, d'autre part, l'orbiteur martien ERO qui doit assurer le support des opérations au sol (télécommunications) depuis l'orbite martienne, récupérer le container contenant les échantillons à la suite d'un rendez-vous en orbite martienne puis revenir sur Terre et larguer dans l'atmosphère terrestre la capsule contenant le container. Cette dernière doit se poser en douceur sur un site terrestre sélectionné. La planification du projet constitue un des aspects les plus complexes de ces deux missions[136] :
- SRL doit éviter l'hiver martien et la saison des tempêtes de poussière car la sonde spatiale, une fois sur le sol, tire son énergie de panneaux solaires.
- L'atterrissage de SRL doit s'effectuer au moment le plus favorable c'est-à-dire lorsque la densité de l'atmosphère de Mars est la plus élevée. Cela permet de déposer sur le sol martien une masse plus importante.
- ERO sert de relais avec la Terre pour l'ensemble des engins déposés sur le sol martien participant à la récupération des échantillons de sol : Mars 2020, SRL, SFR, MAV.
- SRL et ERO doivent pouvoir être lancées par les fusées existantes et les transits des sondes spatiales doivent pouvoir respecter les jalons imposés par les conditions précédentes.
L'ensemble de ces contraintes aboutit à une campagne 26-26-31 : ces trois chiffres correspondant respectivement aux dates de lancement des deux engins (2026) et à l'année de l'arrivée de la capsule d'échantillons sur Terre (2031)[136].

Mission Sample Retrieval Lander (SRL)
[modifier | modifier le code]
La mission Sample Retrieval Lander (SRL), développée par la NASA, consiste à poser sur Mars un engin spatial dont l'objectif final est de ramener sur l'orbite martienne un container des échantillons de sol. Pour remplir cet objectif la sonde spatiale transporte d'une part un petit rover baptisé SFR (Sample Fetch Rover) qui va chercher les tubes contenant les échantillons de sol là où ils ont été déposés par l'astromobile Perseverance de Mars 2020 et d'autre part une fusée MAV (Mars Ascent Vehicle) à propergol solide qui doit ramener les échantillons sur une orbite basse martienne. Le déroulement de cette mission est le suivant[136] :
- la sonde spatiale est lancée durant l'été 2026 et s'insère en orbite martienne deux ans plus tard (été 2028) ;
- SRL pénètre directement dans l'atmosphère martienne à son arrivée (sans insertion en orbite) et se pose avec une très grande précision (20 mètres) non loin d'un des dépôts des échantillons collectés par l'astromobile Perseverance ;
- le rover SFR se rend sur le ou les sites des dépôts et récupère les tubes un à un. Il revient ensuite près du site d'atterrissage ;
- les tubes sont transférés par un bras solidaire de l'atterrisseur dans le container situé au sommet du petit lanceur MAV ;
- l'astromobile Perseverance de la mission Mars 2020, s'il a conservé certains échantillons de sol sans les avoir déposés (les derniers collectés), pourra également les amener sur le site d'atterrissage pour qu'ils soient transférés dans le container ;
- le container est scellé, le lanceur est mis en température, ses instruments de navigation sont étalonnés et les communications sont vérifiées. Une fois ces opérations effectuées le MAV décolle du sol martien pour réaliser un rendez-vous avec la sonde spatiale de la mission ERO qui se trouve en orbite basse martienne et qui est chargée de ramener les échantillons sur Terre ;
- l'ensemble de la campagne au sol dure un an (août 2028 - août 2029).
- Récupération des échantillons
-
 L'atterrisseur SRL se pose sur le sol de Mars.
L'atterrisseur SRL se pose sur le sol de Mars. -
 Les tubes sont chargés dans la fusée MAV.
Les tubes sont chargés dans la fusée MAV. -
 La fusée MAV décolle du sol pour rejoindre l'orbite basse.
La fusée MAV décolle du sol pour rejoindre l'orbite basse.



Mission Earth Return Orbiter (ERO)
[modifier | modifier le code]
Earth Return Orbiter (ERO), développé par l'Agence spatiale européenne, est un engin spatial qui doit se placer sur une orbite basse martienne. Il sert de relais de télécommunications durant les opérations au sol de SRL puis récupère le container amené en orbite par la fusée MAV. Après avoir quitté l'orbite martienne il regagne la Terre. Arrivé à proximité de celle-ci en 2031, il largue la capsule contenant les échantillons de sol martien qui vient se poser en douceur à la surface de la Terre. Le déroulement détaillé de cette mission est le suivant[136] :
- la sonde spatiale ERO est lancée vers août 2026 peu après la mission SRL ;
- elle s'insère sur une orbite martienne elliptique haute en octobre 2027 puis utilise sa propulsion ionique pour réduire progressivement l'altitude de son apogée. Ce type de propulsion, plus efficace, permet de réduire fortement la masse au lancement de la sonde spatiale et donc son coût mais les manœuvres durent plusieurs mois car la poussée de ces moteurs est très faible. L'insertion sur l'orbite basse visée est atteinte en juillet 2028 ;
- de juillet 2028 à août 2029 ERO sert de relais pour les communications entre la Terre et les engins posés sur le sol martien (MAV, SRL, M2020, SFR) ;
- courant août, la fusée MAV décolle du sol martien en emportant le container d'échantillons. Un rendez-vous orbital est opéré entre la capsule (OS) contenant le container et l'orbiteur ERO. Les deux engins disposent d'un créneau de quatre mois pour réussir cette opération (d'août à novembre 2029) ;
- le container est transféré à bord d'ERO ;
- en décembre 2029 ERO s'éloigne progressivement de l'orbite basse de Mars à l'aide de sa propulsion ionique en suivant une trajectoire en spirale ;
- en juillet 2030 ERO échappe à l'attraction de Mars et entame son retour vers la Terre ;
- en septembre 2031, la sonde spatiale survole la Terre : au passage elle largue la capsule (EES) - contenant les échantillons - qui vient se poser en douceur sur Terre.
Autres caractéristiques non-scientifiques
[modifier | modifier le code]Un message caché fut conçu par les ingénieurs de la NASA. La devise du Jet Propulsion Laboratory « Dare Mighty Things » et les coordonnées géographiques du JET sont représentées en code binaire sur les motifs du parachute[139].
Plusieurs objets symboliques sont présents dans le rover comme un cadran solaire ou une plaque avec un « portrait de famille » des rovers martiens (de Sojourner à Perseverance)[140].
Participation du public : l'opération Send your name
[modifier | modifier le code]Comme pour les autres missions d'exploration du système solaire de la NASA, l'astromobile Perseverance embarque des puces en silicium sur lesquelles ont été gravés à l'aide d'un faisceau d'électrons les noms de personnes désireuses d'y figurer. Dans le cadre de l'opération Send your name (Envoyez votre nom) 10 932 295 personnes de tous les pays[Note 19] ont fourni leurs coordonnées (nom/prénom, pays, code postal) sur le site de la NASA et ont pu imprimer une carte d'embarquement symbolique pour Mars à leur nom. Les trois puces gravées sont fixées sur une plaque en aluminium elle-même vissée sur l'arceau arrière de la structure de l'astromobile. Elles sont situées dans le champ de vue des caméras du mât. Les puces contiennent également les 155 textes des finalistes ayant concouru pour baptiser l'astromobile[141],[142].
-
 La plaque sur laquelle sont fixées les trois puces gravées avec les noms des participants à l'opération Send your name.
La plaque sur laquelle sont fixées les trois puces gravées avec les noms des participants à l'opération Send your name. -
 Carte d'embarquement Mars 2020
Carte d'embarquement Mars 2020


Notes et références
[modifier | modifier le code]Notes
[modifier | modifier le code]- Les bornes de la fenêtre de lancement dépendent du rapport entre d'une part la masse de la charge utile et du lanceur vide, et d'autre part la puissance de la fusée. Les ingénieurs conservent une marge tout au long du développement de la mission pour prendre en compte les incertitudes sur les masses finales et la puissance des moteurs. Ces marges peuvent être réduites une fois les engins construits et testés ce qui permet en retour d'allonger la fenêtre de lancement.
- Mars Science Laboratory (Curiosity), la sonde spatiale jumelle n'était pas passée derrière la Terre lors de son lancement et les ingénieurs avaient utilisé une modélisation très conservatrice pour fixer cette température minimale.
- 213 jours si le lancement avait eu lieu à l'ouverture de la fenêtre de lancement le 20 juillet, 203 jours compte tenu du lancement intervenu le 30 juillet.
- La finesse générée (rapport portance sur traînée) est de 0,24 contre 0 pour le véhicule de rentrée des rovers MER.
- À cette vitesse, il n'y a plus de risque que le bouclier, du fait de sa traînée, entre en contact après son éjection avec la sonde. L'éjection est déclenchée par des ressorts.
- Une mission habitée vers Mars aurait au minimum une durée de 500 jours. Pour avoir un retour scientifique à la hauteur de l'investissement effectué, il faudrait en fait compter 900 jours (deux ans et demi dont un et demi sur place). Selon le scénario étudié par la NASA, un tel projet nécessiterait de placer plus de 1 000 tonnes en orbite basse, alors que le programme Apollo ne nécessitait qu'une centaine de tonnes. Sur le plan technique, on ne sait ni protéger un équipage humain des radiations mortelles qu'il subirait durant son transit entre la Terre et Mars, ni faire atterrir un engin dépassant la tonne sur le sol martien.
- Ultra-Compact Imaging Spectrometer : spectromètre visible/infrarouge. Utilisé par MSL.
- Mini-Thermal Emission Spectrometer : spectromètre infrarouge. Utilisé par les rovers MER.
- Alpha Particle X-Ray Spectrometer : spectromètre à particules alpha. Utilisé par MSL.
- Ultra-trace X-Ray Fluorescence : spectromètre à fluorescence X. Utilisé par MSL.
- Mars Hand Lens Imager : caméra microscope. Utilisé par MSL.
- Multispectral Microscopic Imager : Imageur multispectral associé à un microscope.
- Spectromètre Raman.
- Ground Penetrating Radar : détermine les caractéristiques du sous-sol proche.
- In-Situ Resource Utilization : Prototype générant de l'oxygène à partir de l'atmosphère martienne.
- La masse totale indiquée ici (2 400 kg) est celle fournie par le dossier de presse mais celui-ci ne fournit pas la ventilation par sous-composant ; celle-ci est par contre indiquée sur le site de la NASA moins bien actualisé, d'où une masse totale inférieure de 450 kg (1 950 kg).
- Le rendement électrique d'un GTR est très faible et près de 95 % de l'énergie est dissipée sous forme thermique (2 000 W thermiques pour 110 W électriques).
- La NASA développe une mission qui repose entièrement sur un engin volant : Dragonfly doit se poser sur Titan, la plus grosse lune de Saturne. Celle-ci présente l'avantage de disposer d'une atmosphère dense mais elle est beaucoup plus éloignée et les températures y sont beaucoup plus basses.
- Les personnes inscrites viennent du monde entier. En tête viennent les habitants de la Turquie (2,528 millions), de l'Inde (1,778 million), des États-Unis (1,734 million) avec une plus forte contribution des états fortement impliqués dans le spatial - Californie, Floride et Texas -, de la Chine (292 071) et de l'Iran (287512). Parmi les pays francophones le Canada compte 143 032 participants, la France 108 577, le Maroc 29 975, la Belgique 27 550, l'Algérie 24 653, la Suisse 14 955 et la Tunisie 10 832.
Références
[modifier | modifier le code]- (en) Chris Gebhardt, « Finding additional days in a short, interplanetary launch window to Mars », sur spaceflightnow.com,
- (en) Stephen Clark, « NASA delays Mars rover launch to no earlier than July 30 », sur spaceflightnow.com, .
- (en) Chris Gebhardt, « Perseverance, Ingenuity begin seven month journey to Mars », sur nasaspaceflight.com, .
- (en) Justin Ray, « NASA books nuclear-certified Atlas 5 rocket for Mars 2020 rover launch », sur spaceflightnow.com, .
- (en) « Mars 2020 Mission, Perseverance Rover Launch », sur Site officiel Mars 2020, NASA (consulté le ).
- Mars 2020 Perseverance Launch Press Kit, p. 23.
- (en) Stephen Clark, « Mars 2020 spacecraft resumes normal operations after post-launch safe mode », sur spaceflightnow.com, .
- Mars 2020 Perseverance Launch Press Kit, p. 25.
- (en) « Mission Timeline › Cruise », NASA (consulté le ).
- F. Abilleira, op. cit. p. 14.
- Eric Berger, « Here’s an example of the crazy lengths NASA goes to land safely on Mars - 15 years of work for 10 seconds of action », Ars Technica, .
- (en) « Technology > Entry, Descent, and Landing Technologies », sur NASA - MARS 2020 (consulté le )
- Mars 2020 Perseverance Launch Press Kit, p. 27-28.
- Mars Perseverance Landing Press Kit, p. 20.
- (en) « Touchdown! NASA's Mars Perseverance Rover Safely Lands on Red Planet », NASA, .
- Mars Perseverance Landing Press Kit, p. 25.
- Ingenuity Mars Helicopter landing press kit, p. 25-26.
- (en) « NASA's Perseverance Rover Sends Sneak Peek of Mars Landing », NASA, .
- Ingenuity Mars Helicopter landing press kit, p. 26.
- (en) « Mars Helicopter to Fly on NASA’s Next Red Planet Rover Mission », NASA, .
- (en) Kenneth Chang, « A Helicopter on Mars? NASA Wants to Try », New York Times, .
- (en) « Mission timeline > Surface operations », sur NASA - MARS 2020 (consulté le ).
- (en) Sarah Milkovich, « Introduction to Rover Operations », .
- (en) Michael Wilson, Jennifer Trosper et Fernando Abilleira1, « Texture-specific elemental analysis of rocks and soils with PIXL: The Planetary Instrument for X-ray Lithochemistry on Mars 2020 », 2015 IEEE Aerospace Conference, , p. 1-18 (lire en ligne [PDF]).
- Francis Rocard, Dernières nouvelles de Mars : la mission du siècle, (ISBN 978-2-0814-5145-2), « Chapitre premier : La vie sur Mars : quoi de neuf ? ».
- Francis Rocard, Dernières nouvelles de Mars : la mission du siècle, (ISBN 978-2-0814-5145-2), « Chapitre deux : Le retour d'échantillons martiens »
- (en) Committee on the Planetary Science Decadal Survey - Space Studies Board - Division on Engineering and Physical Sciences, Vision and Voyages for Planetary Science in the Decade 2013-2022, National Academy of Sciences, , 398 p. (ISBN 978-0-309-22464-2, lire en ligne [PDF]).
- (en) « International cooperation called key to planet exploration », .
- (en) Jonathan Amos, « Nasa to send new rover to Mars in 2020 », sur BBC News, .
- (en) William Harwood, « NASA announces plans for new $1.5 billion Mars rover », sur CNET, .
- (es) Daniel Marín, « Perseverance y Curiosity: dos rovers marcianos gemelos con objetivos diferentes », sur Eureka, .
- (en) « NASA Discusses Mars 2020 Plans In July 9 Teleconference », sur NASA,
- J.F. Mustard et al., op. cit. p. 6.
- J.F. Mustard et al., op. cit. p. 135.
- J.F. Mustard et al., op. cit. p. 80.
- J.F. Mustard et al., op. cit. p. 17-29.
- J.F. Mustard et al., op. cit. p. 30-50.
- « Mission > Science > Objectives », sur NASA - mars 2020, (consulté le ).
- J.F. Mustard et al., op. cit. p. 59-73.
- « Le "nouveau Curiosity" fabriquera de l'oxygène », Europe 1, (consulté le ).
- Julien Bergounhoux, « Le prochain rover de la Nasa fabriquera de l'oxygène sur Mars », L'usine nouvelle, (consulté le ).
- (en) « NASA's Next Mars Rover Progresses Toward 2020 Launch », sur Mars 2020, NASA, .
- (en) « NASA's Mars 2020 Mission Performs First Supersonic Parachute Test », sur Mars 2020, NASA, .
- (en) « Next NASA Mars Rover Reaches Key Manufacturing Milestone », sur Mars 2020, NASA, .
- (en) « Results of Heat Shield Testing », sur Mars 2020, NASA, .
- (en) « Third ASPIRE Test Confirms Mars 2020 Parachute a Go », sur Mars 2020, NASA, .
- (en) « NASA's Mars 2020 Rover Is Put to the Test », sur Mars 2020, NASA, .
- (en) « NASA's Mars Helicopter Completes Flight Tests », sur Mars 2020, NASA, .
- (en) « NASA's Mars Helicopter Testing Enters Final Phase », sur Mars 2020, NASA, .
- (en) « Things Are Stacking up for NASA's Mars 2020 Spacecraft », sur Mars 2020, NASA, .
- (en) « NASA's Mars 2020 Gets a Dose of Space Here on Earth », sur Mars 2020, NASA, .
- (en) « The Mast Is Raised for NASA's Mars 2020 Rover », sur Mars 2020, NASA,
- (en) « Mars 2020 Rover Gets Its Wheels », sur Mars 2020, NASA,
- (en) « Mars 2020 Rover's 7-Foot-Long Robotic Arm Installed », sur Mars 2020, NASA, .
- (en) « Mars 2020 Rover Gets a Super Instrument », sur Mars 2020, NASA, .
- (en) « NASA's Mars 2020 Rover Does Biceps Curls », sur Mars 2020, NASA, .
- (en) « Robotic Toolkit Added to NASA's Mars 2020 Rover », sur Mars 2020, NASA, .
- (en) « NASA's Mars 2020 Comes Full Circle », sur Mars 2020, NASA, .
- (en) « NASA's Mars 2020 Rover Tests Descent-Stage Separation », sur Mars 2020, NASA, .
- (en) « Mars 2020 Unwrapped and Ready for More Testing », sur Mars 2020, NASA, .
- (en) « NASA Updates Mars 2020 Mission Environmental Review », sur Mars 2020, NASA, .
- (en) « Mars 2020 », sur EO Portal, Agence spatiale européenne (consulté le ).
- (en) Office of Inspector General, NASA’s MARS 2020 project, (lire en ligne [PDF]), p. 7-8.
- (en) Government Accountability Office, « NASA Assessments of Major Project », .
- Mars 2020 Perseverance Launch Press Kit, p. 20.
- (en) « Letter summarizing the Findings of the May 2014 Mars Landing Site Workshop » [doc], sur NASA - MARS 2020, (consulté le ).
- (en) « Final Workshop Letter describing the outcome of the 2nd Mars 2020 landing site workshop », sur NASA,
- « Picking a Landing Site for NASA's Mars 2020 Rover », sur NASA - MARS 2020, (consulté le ).
- (en) Emily Lakdawalla, « We're going to Jezero! - NASA Selects Jezero Crater Landing Site for Mars 2020 Rover », The Planetary Society, .
- Voir en ligne, sur Google Maps.
- « NASA Announces Landing Site for Mars 2020 Rover », sur NASA, .
- (en) Emily Lakdawalla, The Design and Engineering of Curiosity How the Mars Rover Performs Its Job, Springer-PRAXIS, (ISBN 978-3-319-68144-3)
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge University Press, (ISBN 978-0-521-82956-4).
- J.F. Mustard et al., op. cit. p. 115.
- J.F. Mustard et al., op. cit. p. 69.
- (en) « Cruise Configuration », ASA/JPL (consulté le ).
- (en) Nancy Atkinson, « How Will MSL Navigate to Mars? Very Precisely » (consulté le ).
- « Mission> Rover », sur NASA - MARS 2020 (consulté le ).
- Mars 2020 Perseverance Launch Press Kit, p. 30.
- (en) « Rover : Wheels and Legs », sur Mars 2020 (site officiel), Jet Propulsion Laboratory (consulté le )
- Mars 2020 Perseverance Launch Press Kit, p. 31.
- (en) « Rover : Electrical Power », sur Mars 2020 (site officiel), Jet Propulsion Laboratory (consulté le ).
- (en) Ajay K. Misra « Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power » () (lire en ligne) [PDF]
—4th International Energy Conversion Engineering Conference and Exhibit (IEEC). - (en) « Rover : Communications », sur Mars 2020 (site officiel), Jet Propulsion Laboratory (consulté le )
- (en) « NASA's MAVEN Spacecraft Shrinking its Mars Orbit to Prepare for Mars 2020 Rover », sur Mars 2020 (site officiel), Jet Propulsion Laboratory (consulté le ).
- (en) « Rover : Brains », sur Mars 2020 (site officiel), Jet Propulsion Laboratory (consulté le ).
- (en) « Rover : Robotic Arm », sur Mars 2020 (site officiel), Jet Propulsion Laboratory (consulté le ).
- (en) Evan Ackerman, « This Is the Most Powerful Robot Arm Ever Installed on a Mars Rover - How NASA's Jet Propulsion Laboratory designed the robot arm for the Mars 2020 rover », sur IEEE Specrum, IEEE, .
- (en) « Mission - Rover - Sample Handling », sur Mars 2020 (JPL), Jet Propulsion Laboratory (consulté le )
- (en) « Mission - Rover - Arm », sur Mars 2020 (JPL), Jet Propulsion Laboratory (consulté le ).
- (en) « NASA Announces Mars 2020 Rover Payload to Explore the Red Planet as Never Before », NASA, .
- (en) Van Kane, « Mars 2020 Instruments – A Plan for Sample Return », Planteraty society, .
- Mars 2020 Perseverance Launch Press Kit, p. 31-32
- Mars 2020 Perseverance Launch Press Kit, p. 42-45.
- J.F. Mustard et al., op. cit. p. 143-145.
- Julien Bergounhoux, « La Nasa dévoile les 7 instruments de son rover martien prévu pour 2020, dont un français », Industrie & Technologies, (consulté le ).
- (en) « Mastram-Z », sur NASA - Mars 2020, NASA (consulté le ).
- (en) « MEDA », sur NASA - Mars 2020, NASA (consulté le ).
- (en) « PIXL », sur NASA - Mars 2020, NASA (consulté le ).
- (en) « RIMFAX », sur NASA - Mars 2020, NASA (consulté le ).
- (en) « SHERLOC », sur NASA - Mars 2020, NASA (consulté le ).
- (en) « SuperCam », sur NASA - Mars 2020, NASA (consulté le ).
- (en) « MOXIE », sur NASA - Mars 2020, NASA (consulté le ).
- Julien Lausson, « La mission Mars 2020 s'appuiera sur un nombre record de caméras - Sciences - Numerama », Numerama, (lire en ligne, consulté le ).
- Mars 2020 Perseverance Launch Press Kit, p. 18-19.
- Mars Perseverance Landing Press Kit, p. 32-33.
- « Mission > Instruments > Mastcam-Z > Overview », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > Mastcam-Z > Team », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > Mastcam-Z > For scientists », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > SuperCam > For scientists », sur NASA - MARS 2020 (consulté le ).
- (en) Roger Wiens, « ‘SuperCam’ Update: Multi-purpose Instrument Coming Together for 2020 Launch to Mars », The Planetary Society,
- « Instrument Supercam sur le rover Mars 2020 », CNES, .
- « Mission > Instruments > SuperCam > Overview », sur NASA - Mars 2020 (consulté le )
- « Mission > Instruments > SuperCam > Team », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > RIMFAX > Overview », sur NASA - MARS 2020 (consulté le )
- « Mission > Instruments > RIMFAX > Fast Facts », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > RIMFAX > For scientists », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > RIMFAX > Team », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > PIXL > Overview », sur NASA - MARS 2020 (consulté le ).
- Texture-specific elemental analysis of rocks and soils with PIXL: The Planetary Instrument for X-ray Lithochemistry on Mars 2020, p. 1-6.
- « Mission > Instruments > PIXL > Team », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > PIXL > For scientists », sur NASA - MARS 2020 (consulté le ).
- « Mission > Instruments > SHERLOC > For scientists », sur NASA - MARS 2020 (consulté le ).
- (en) Trevor Graff, Marc Fries et Aaron Burton, « Mars 2020 RoverSHERLOC Calibration Target » [PDF], sur MARS 2020, NASA, .
- (en) « Mission > Instruments > SHERLOC > Overview », sur MARS 2020, NASA (consulté le ).
- (en) « Mission > Instruments> SHERLOC> Team », sur NASA - MARS 2020 (consulté le ).
- (en) « Mission > Instruments > MEDA > Overview », sur NASA - MARS 2020 (consulté le ).
- (en) « Mission > Instruments > MEDA > For scientists », sur MARS 2020, NASA (consulté le ).
- (en) Sean Potter, « NASA’s Perseverance Mars Rover Extracts First Oxygen from Red Planet », sur NASA, (consulté le )
- (en) « Mission > Instruments > MOXIE > Overview », sur NASA - MARS 2020 (consulté le ).
- (en) « Mission > Instruments > MOXIE > Team », sur NASA - MARS 2020 (consulté le ).
- (en) « Mission > Instruments > MOXIE > For scientists », sur NASA - MARS 2020 (consulté le ).
- Mars 2020 Perseverance Launch Press Kit, p. 8-10.
- Mars 2020 Perseverance Launch Press Kit, p. 18.
- (en) Stephen Clark, « Helicopter to accompany NASA’s next Mars rover to Red Planet », sur spaceflightnow.com, .
- (en) Nancy Atkinson, « Perseverance Microphones Fulfill Planetary Society Campaign to Hear Sounds from Mars », The Planetary Society, .
- (en) Austin Nicholas, « MSR Timeline and Concept of Operations », sur MEPAG, NASA, .
- (en) S. Vijendran, J. Huesing, F. Beyer, A. McSweeney, « Mars Sample Return Earth Return Orbiter Mission Overview », Inconnu, European Space Research and Technology Centre (ESTEC), .
- « Airbus: l'ESA confie deux études pour des échantillons martiens », VotreArgent.fr, (lire en ligne, consulté le ).
- « Perseverance : découvrez le message caché dans le parachute du rover », sur L'Union, .
- « Avez-vous remarqué ce portrait de famille sur Perseverance ? », sur Numerama,
- (en) « 10.9 Million Names Now Aboard NASA's Perseverance Mars Rover », NASA, .
- (en) « Send your name to Mars - Mars 2020 - Map », NASA (consulté le ).
Bibliographie
[modifier | modifier le code]- (en) Office of Inspector General, NASA’s MARS 2020 project, (lire en ligne [PDF]).Évaluation du projet par l'audit interne de la NASA effectué début 2017.
- (en) Wayne Johnson, Shannah Withrow-Maser, Larry Young et al., Mars Science Helicopter Conceptual Design, (lire en ligne [PDF]).Étude d'architecture de l'hélicoptère martien.
NASA
[modifier | modifier le code]- (en) Mars Perseverance Press Kit, , 72 p. (lire en ligne [PDF]). Dossier de presse fourni pour l'atterrissage de la mission Mars 2020.
- (en) NASA, Ingenuity Mars Helicopter landing press kit, NASA, , 33 p. (lire en ligne [PDF]). Dossier de presse de la NASA sur l'hélicoptère Ingenuity.
- (en) NASA, Mars 2020 Perseverance Launch Press Kit, , 63 p. (lire en ligne [PDF]). Dossier de presse fourni pour le lancement de la mission Mars 2020.
- (en) J.F. Mustard et al., Report of the Mars 2020 Science Definition Team, NASA, , zip (lire en ligne). Rapport de l'équipe chargé de la définition du contenu scientifique de la mission Mars 2020.
- Annexes du rapport [PDF].
- (en) Fernando Abilleira, Seth Aaron, Chuck Baker, Dan Burkhart, Gerard Kruizinga, Julie Kangas et al., Mars 2020 mission design and navigation overview, NASA, (lire en ligne).Description du scénario retenu pour le lancement et le transit de Mars 2020.
- (en) Michael Wilson, Jennifer Trosper et Fernando Abilleira1, « NASA Mars 2020 Landed Mission Development », NASA, , p. 1-18 (lire en ligne [PDF]).
- (en) Jason G. Kempenaar, Keith S. Novak, Matthew J. Redmond, Edgardo Farias et al., « Detailed Surface Thermal Design of theMars 2020Rover », 48th International Conference on Environmental Systems ICES-2018-538-, Albuquerque, New Mexico, , p. 1-19 (lire en ligne [PDF]).
- (en) Andrew Johnson, Seth Aaron, Johnny Chang et al., « The Lander Vision System for Mars 2020 Entry Descent and Landing », AAS Guidance Navigation and Control Conference, , p. 1-19 (lire en ligne)Description du système d'atterrissage de précision LVS.
Articles sur les instruments scientifiques et les équipements
[modifier | modifier le code]- (en) Abigail C. Allwood, Lawrence A.Wade, Marc C. Foote, William Timothy Elam, Joel A. Hurowitz et al., « PIXL: Planetary Instrument for X-Ray Lithochemistry », Space Science Reviews, nos 216-134, , p. 1-132 (DOI 10.1007/s11214-020-00767-7, lire en ligne [PDF])Caractéristiques de l'instrument PIXL.
- (en) M. Hecht, J. Hoffman, D. Rapp, J. McClean, J. SooHoo et al., « Mars Oxygen ISRU Experiment (MOXIE) », Space Science Reviews, nos 217,9, , p. 1-76 (DOI 10.1007/s11214-020-00782-8, lire en ligne [PDF])Caractéristiques de l'expérience d'exploitation des ressources in situ MOXIE.
- (en) Svein-Erik Hamran, David A. Paige, Hans E. F. Amundsen, Tor Berger et al., « Radar Imager for Mars’ Subsurface Experiment—RIMFAX », Space Science Reviews, nos 216,128, , p. 1-39 (DOI 10.1007/s11214-020-00740-4, lire en ligne [PDF])Caractéristiques du radar imageur RIMFAX.
- (en) Roger C. Wiens, Sylvestre Maurice, Scott H. Robinson et al., « The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests », Space Science Reviews, nos 216,4, , p. 1-87 (DOI 10.1007/s11214-020-00777-5, lire en ligne [PDF])Caractéristiques de la partie interne de l'instrument SuperCam et tests de l'ensemble de l'instrument.
- (en) J. F. Bell III, J. N. Maki, G. L. Mehall, M. A. Ravine et al., « The Mars 2020 Perseverance Rover Mast Camera Zoom (Mastcam-Z) Multispectral, Stereoscopic Imaging Investigation », Space Science Reviews, nos 217,24, , p. 1-40 (DOI https://doi.org/10.1007/s11214-020-00755-x, lire en ligne [PDF])Caractéristiques de la caméra multispectrale et stéréoscopique Mastcam-Z.
- (en) J. F. M. Álvarez, M. de la Torre Juárez, A. Alonso, V. Apéstigue4 et al., « The Mars Environmental Dynamics Analyzer, MEDA. A Suite of Environmental Sensors for the Mars 2020 Mission », Space Science Reviews, no 217:48, , p. 1-86 (DOI https://doi.org/10.1007/s11214-021-00816-9, lire en ligne [PDF]) — Description de la suite d'instruments météorologiques MEDA.
- (en) L. W. Beegle, R. Bhartia, L. DeFlores, W. Abbey et al. « The SHERLOC investigation on the mars 2020 rover » () (lire en ligne) [PDF]
—51st Lunar and Planetary Science Conference. — Court article sur l'instrument SHERLOC. - (en) J. N. Maki, D. Gruel, C. McKinney, M. A. Ravine, M. Morales et al., « The Mars 2020 Engineering Cameras and Microphone on the Perseverance Rover: A Next-Generation Imaging System for Mars Exploration », Space Science Reviews, nos 216,137, , p. 1-48 (DOI https://doi.org/10.1007/s11214-020-00765-9, lire en ligne [PDF])Caractéristiques des caméras d'ingénierie et des microphones installés sur l'astromobile.
- (en) Robert C. Moeller, Louise Jandura, Keith Rosette, M. Matt Robinson, Jessica Samuels et al., « The Sampling and Caching Subsystem (SCS) for the Scientific Exploration of Jezero Crater by the Mars 2020 Perseverance Rover », Space Science Reviews, no 217:5, , p. 1-43 (DOI 10.1007/s11214-020-00783-7, lire en ligne [PDF])Description du système SCS de prélèvement et de stockage des carottes du sol martien.
Contexte scientifique
[modifier | modifier le code]- (en) International MSR Objectives and Samples Team (iMOST), « The Potential Science and Engineering Value of Samples Delivered to Earth by Mars Sample Return », MEPAG, , p. 1-186 (lire en ligne [PDF]).Objectifs détaillés de la mission de retour d'échantillons martiens définis par le groupe d'experts internationaux du MEPAG ⇒ Critères de sélection des échantillons.
Voir aussi
[modifier | modifier le code]Articles connexes
[modifier | modifier le code]- Exploration de Mars par Perseverance
- Ingenuity, prototype d'hélicoptère embarqué à bord de Perseverance
- Mars Sample Return, mission qui sera chargée de ramener les échantillons collectés par Perseverance au cours de la mission Mars 2020
- SuperCam, un des principaux instruments de l'astromobile
- Exploration de Mars
- Géologie de Mars
- Mars Science Laboratory, et son astromobile Curiosity
- Exploration de Mars par Curiosity
- Vie sur Mars
Vidéos
[modifier | modifier le code]-
Films tournés par les caméras de Mars 2020 durant la descente vers le sol martien.
-
Animation montrant la descente de la sonde spatiale jusqu'au sol de Mars
-
Animation présentant les instruments de l'astromobile Perseverance.
-
Animation montrant la collecte d'un échantillon du sol de Mars.
-
Vidéo des tests de déploiement de l'hélicoptère sur le sol de Mars.
-
Animation montrant un vol de l'hélicoptère.
Liens externes
[modifier | modifier le code]- (en) Site officiel de la mission Mars 2020 (NASA - JPL)
- Site très complet en français sur la mission Mars 2020 de Philippe Labrot.
- (en) La page Mars 2020 sur le site EO Portal de l'Agence spatiale européenne
- « Supercam, des yeux et des oreilles sur Mars », sur CNRS (consulté le ), un film d'animation

