
Mariner 4
Sonde spatiale ( Mars )

| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Mariner |
| Domaine | Observation de la planète Mars |
| Type de mission | Sonde planétaire |
| Nombre d'exemplaires | 2 |
| Statut | Mission terminée |
| Autres noms | Mariner-D |
| Base de lancement | Cap Canaveral, LC-12 |
| Lancement |
à 14 h 22 min 01 s TU |
| Lanceur | Atlas-Agena D # 12 |
| Survol de | Mars |
| Fin de mission | |
| Durée | 1 119 jours |
| Identifiant COSPAR | 1964-077A |
| Site | www.jpl.nasa.gov/missions/mariner-4 |
| Masse au lancement | 260,8 kg |
|---|---|
| Propulsion | Chimique |
| Ergols | Hydrazine |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 700 watts |
| Orbite | Héliocentrique |
|---|---|
| Périapside | 1,1086 UA |
| Apoapside | 1,5731 UA |
| Période de révolution | 567,11 jours |
| Inclinaison | 2,54374° |
| Mars Television Camera Experiment | Système de caméra de télévision |
|---|---|
| Helium Magnetometer | Champ magnétique interplanétaire |
| Solar Plasma Probe | Sonde de vent solaire |
| Trapped Radiation Detector | Détecteur de rayonnement |
| Détecteur de particules | Ceinture de radiation et particules solaires |
| Cosmic-Ray Telescope | Étude du rayonnement cosmique |
| Cosmic Dust Detector | Détecteur de poussières cosmiques |
| Mars Occultation Experiment | Expérience d'occultation de la planète Mars |
| Celestial Mechanics Experiment | Expérience de mécanique céleste |
Mariner 4 est la quatrième sonde spatiale du programme Mariner. Elle est lancée par la NASA le pour prendre des photographies de la planète Mars. Elle réalise le premier survol de la planète Mars, envoie les premières images de la surface martienne et de fait, les premières images rapprochées d'une autre planète. Les photos de la surface stérile et parsemée de cratères étonnent la communauté scientifique. Le coût total de la mission Mariner 4 est de 83,2 millions de dollars américains (équivalent a 675 millions de $ actuellement).
Sommaire[modifier | modifier le code]
La NASA approuve deux sondes spatiales pour le projet Mariner 1964 en . L'objectif principal de Mariner 4, baptisé Mariner-D, est de photographier la surface de la planète Mars à l'aide d'une seule caméra de télévision fixée sur une plate-forme pouvant retourner jusqu'à 22 images après un voyage de près de huit mois, lors de son survol et les transmettre à la Terre et pour effectuer des mesures scientifiques.
Mariner 4 est une sonde spatiale utilisée pour l'exploration planétaire en mode survol et représente le premier survol réussi de la planète Mars, envoyant les premières images de la surface martienne. Celles-ci représentent les premières images d'une autre planète envoyées de l'espace lointain. Mariner 4 est conçu pour mener des observations scientifiques de la planète Mars et pour les transmettre à la Terre[1].
Les autres objectifs de la mission consistent à effectuer des mesures du champ magnétique et des particules du milieu interplanétaire situé à proximité de la planète Mars et de fournir l'expérience et la connaissance en matière d'ingénierie pour les vols interplanétaires de longue durée.
Description du véhicule spatial[modifier | modifier le code]

Mariner 4 est un véhicule spatial de 260,8 kg. L'énergie électrique nécessaire à toutes les expériences et à toutes les fonctions est fournie par 28 244 cellules photovoltaïques montées sur quatre panneaux solaires conçus pour se déployer en vol. Les cellules fournissent 700 W de puissance électrique, qui est convertie en différentes formes pour faire fonctionner la sonde spatiale et recharger l'accumulateur de bord. Lors du survol de la planète Mars, elles produisent 300 W, ce qui représente une marge de sécurité pour la charge utile.
La sonde spatiale Mariner 4 est constituée d'une plate-forme octogonale de 127 cm de diagonale et de 45,7 cm de hauteur. Quatre panneaux solaires de 176 × 90 cm prolongés par des pales solaires de 0,65 m2 sont fixés au sommet du châssis, conférant au véhicule une envergure de 6,88 m. Une antenne parabolique fixe à haut gain de 116,8 cm de diamètre est montée au centre du sommet de la plate-forme tandis qu'une antenne omnidirectionnelle à faible gain est montée à l'extrémité d'un mât de 2,235 m enchâssé au pied de la parabole. La hauteur totale de la sonde spatiale est de 2,89 m.

À la base de la plate-forme, la caméra de télévision est montée sur sa plate-forme d'observation. Les huit côtés de la plate-forme octogonale sont constitués par des paniers à équipements électroniques et le système de propulsion pour la correction de trajectoire. À l'intérieur de cette plate-forme se trouvent les réserves de carburant pour la propulsion et le contrôle d'attitude, qui profitent ainsi d'un espace à température contrôlée. La température est maîtrisée par une isolation thermique, par la radioactivité des diverses surfaces et est régulée par des persiennes mobiles sur six des huit faces de l'octogone. Les instruments scientifiques se trouvent hors de la plate-forme[2].
Un accumulateur argent-zinc de 1 200 Wh est utilisé lors des phases où les panneaux solaires ne sont pas orientés vers le Soleil.
La propulsion principale est assurée par un moteur de 222 N à monergol hydrazine commandant son moteur-fusée par quatre gouvernes de jet, situé sur un des côtés de la plate-forme. Le contrôle d'attitude est opéré par 6 paires de propulseurs à azote gazeux froid situés aux extrémités des panneaux solaires, trois gyroscopes et accessoirement par les pales solaires. L'attitude de la sonde est verrouillée en tangage et lacet par des pointeurs solaires l'orientant automatiquement face au Soleil, puis le roulis est ajusté par un viseur d'étoiles vers Canopus, l'étoile la plus brillante de la constellation australe de la Carène, cette dernière opération prenant alors près d'une journée à être effectuée[3].
Le système de télécommunication opère en bande S et est composé d'un simple récepteur et d'un émetteur basé soit sur une triode double à 7 W, soit sur un tube à ondes progressives à 10 W, les données peuvent être reçues ou émises à 33,33 bit/s ou 8,33 bit/s, ces diverses options dépendaient de l'éloignement de la sonde. Les données peuvent également être emmagasinées sur un enregistreur 4 pistes d'une capacité de 5,24 Mbits pour être transmises ultérieurement.
Description des instruments[modifier | modifier le code]
La sonde spatiale a neuf instruments :
- Expérience d'occultation de la planète Mars (Mars Occultation Experiment), est une expérience sur les changements d'intensité et de phase observés dans le signal de télémétrie de 2 300 MHz de la sonde spatiale alors que la sonde est occultée par la planète Mars utilisée pour déduire les propriétés de l'atmosphère martienne. Les modifications résultent de la réfraction atmosphérique du signal radio. Les données ne couvrent donc que le temps près du survol de la planète Mars lorsque le signal est courbé et ralenti par l'atmosphère (2 minutes de chaque côté). La planète Mars occulte le signal de la sonde spatiale avec son côté éclairé par le Soleil et le signal apparaît du côté de la face cachée.
- Expérience de mécanique céleste (Celestial Mechanics Experiment), les données de suivi du réseau de communications avec l'espace lointain (Deep Space Network) de Mariner 4 sont utilisées pour obtenir de meilleures mesures des masses de la planète Mars et de la Lune, l'unité astronomique, ainsi que des éphémérides améliorées de la Terre et de Mars. L'expérience utilise l'équipement récepteur et émetteur embarqué conjointement avec l'équipement de suivi de la Deep Space Station pour obtenir des mesures Doppler. L'expérience fournit des données de bonne qualité du au , bien que la période près de est bruyante en raison de la faible intensité du signal.
- Détecteur de poussières cosmiques (Cosmic Dust Detector), le détecteur est constitué d’une plaque d'impact en aluminium de 22 × 22 cm revêtue des deux côtés d'un matériau non conducteur et muni d'un transducteur acoustique à cristaux collés sur un côté, est utilisé pour surveiller en permanence le flux de particules de poussières et leur distribution depuis la Terre jusqu'au survol de la planète de Mars. La combinaison plaque d'impact et film diélectrique-aluminium constitue un détecteur de pénétration sous la forme d'un condensateur. L'expérience vise également à observer la concentration de particules de poussières près de la Terre et près de la planète Mars, le taux de changement de la densité du flux de particules de poussières cosmiques par rapport à la Terre et les effets perturbateurs de grands corps planétaires sur le comportement dynamique des particules de poussières cosmiques. L'instrument est monté au-dessus de la plate-forme principale du véhicule spatial, le boîtier se trouvant juste à l'intérieur du bouclier thermique afin de le protéger du Soleil. Le capteur fait saillie à travers une ouverture du bouclier thermique. La mémoire de l'instrument est composée de deux registres d'analyse de données binaires de 8 bits et un accumulateur de microphone qui enregistre le nombre d'événements du microphone observés par l'instrument. Des données expérimentales sont reçues concernant le mouvement des particules, la direction des particules entrantes, les impacts de particules inférieurs au seuil du microphone et les accumulations d'événements du microphone. Les mesures révèlent une concentration de poussières cosmiques près de la Terre avec une distribution de masse quelque peu différente de celle du milieu interplanétaire. L'étalonnage en vol est effectué une fois par jour sur ordre du sol. Aucune dégradation de l'instrument n'est détectée.
- Télescope à rayons cosmiques (Cosmic-Ray Telescope), un ensemble de trois détecteurs de surface en silicium est utilisé sous la forme d'un télescope dE/dx en fonction de la distance pour déterminer le flux de protons entre 15 et 70 MeV et entre 70 et 170 MeV et les particules alpha entre 15 et 70 MeV/nucléon et au-dessus de 70 MeV/nucléon, ainsi que des protons et des particules alpha entre 1,2 et 15 MeV/nucléon. Le détecteur est monté sur la sonde spatiale de manière à toujours pointer dans la direction opposée au Soleil. Un analyseur de la hauteur d'une impulsion à 128 canaux est utilisé pour analyser la perte d'énergie dans l'élément détecteur du télescope. Il est possible d'analyser la hauteur d'une impulsion des protons et des particules alpha de 15 à 70 MeV/nucléon, des protons de 70 à 170 MeV et des particules alpha supérieur à 70 MeV/nucléon. Deux taux de comptage et deux de hauteur d'impulsion sont obtenus toutes les 72 ou 18 secondes, selon que le taux de transmission de la sonde spatiale est de 8,33 ou 33,33 bps (bit par seconde). L'expérience fonctionne normalement du lancement jusqu'au mois d', date à laquelle le véhicule spatial est éteint pour conserver de l'énergie. Lorsque le véhicule spatial est contacté, le détecteur ne répond pas.
- Magnétomètre à hélium (Helium Magnetometer), un magnétomètre vectoriel à l'hélium à champ faible, à ne pas confondre avec le magnétomètre à vapeur de rubidium ou à vapeur d'hélium, est utilisé pour mesurer le champ magnétique interplanétaire. Les trois composantes du champ sont mesurées simultanément, puis sont transmises ultérieurement en séquence. Chaque observation représente une moyenne de plus d'une seconde. C'est-à-dire que la réponse chute de 3 dB pour les fréquences de 1 Hz et les informations de fréquence supérieure sont perdues. Dans chaque trame de données, des mesures à quatre vecteurs sont effectuées, séparées par des intervalles de 1,5, 0,9 et 2,4 secondes. La trame entière est répétée toutes les 12,5 secondes. Il y avait une incertitude de plus ou moins 0,35 nT par composant. La plupart des données de cette expérience proviennent de la région interplanétaire, mais certaines données proviennent de la planète Mars.
- Système de caméra de télévision (Mars Television Camera Experiment), l'expérience de télévision sur Mars est conçue pour obtenir des photographies de la surface martienne et les envoyer vers la Terre. Le sous-système de télévision consiste en
- 1° un télescope réfléchissant de type Cassegrain à angle étroit avec une distance focale effective de 30,5 cm et un champ de vision de 1,05 × 1,05° ;
- 2° un ensemble obturateur et filtre ayant des temps d'exposition de 0,08 et 0,20 seconde et utilisant des filtres rouge et vert ;
- 3° un tube de télévision Vidicon à balayage lent, avec une cible de 0,56 × 0,56 cm, qui traduit l’image optique en un signal électrique vidéo,
- 4° les composants électroniques associés, y compris un encodeur de données de télévision.
- 1° un télescope réfléchissant de type Cassegrain à angle étroit avec une distance focale effective de 30,5 cm et un champ de vision de 1,05 × 1,05° ;
Le à 00 h 18 TU, commence la séquence d'enregistrement des images. La caméra de télévision Vidicon subit une conversion analogique-numérique et les données sont emmagasinées à 240 000 bits par image (chaque image comptait 200 lignes par 200 pixels, 6 bits par pixel) sur une bande magnétique à deux pistes de 0,64 cm sur 100 m de long, capable d'enregistrer un peu plus de 21 images. La vitesse de la bande sur la tête d'enregistrement doit être d'environ 31 cm par seconde, avec des arrêts entre les images pour économiser la bande. Deux images sur trois sont enregistrées sur la bande, donnant une chaîne de paires d'images en couleurs se chevauchant et s'étendant sur toute la surface de Mars. Les données sont transmises après l'occultation de la sonde spatiale par la planète Mars par le sous-système radio du 15 au et sont traitées en temps réel par un système 7044/7094 des données d’image pour traitement par les programmes de traitement de télévision Ranger et pour conversion en enregistrement de film. La conversion de signaux électriques en une image optique est effectuée par l'enregistreur vidéo-film en utilisant 64 nuances. L'expérience donne 21 images plus 21 lignes de la 22e image. Cette performance indique une séquence d'enregistrement normale. Les programmes de traitement informatique produisent des photographies avec un contraste plus élevé que les données des images brutes.
- Sonde solaire à plasma (Solar Plasma Probe), la sonde est conçue pour mesurer le caractère du plasma interplanétaire, y compris le flux, l'énergie et la direction des protons. Les objectifs sont les suivants :
- 1° déterminer la densité du flux positif dans la plage de 5 × 10−5 à 5 × 10−9 particules par cm2 par seconde ;
- 2° mesurer le spectre d'énergie du vent solaire dans une plage de 30 eV à 10 keV ;
- 3° déterminer la direction d'arrivée du flux de plasma dans un cône de demi-angle de 15° (centré à 10° de la ligne Soleil-Mariner 4) ;
- 4° mesurer les variations temporelles et spatiales des quantités ci-dessus ;
- 5° mettre en corrélation les mesures ci-dessus avec celles du champ magnétique interplanétaire.
- 1° déterminer la densité du flux positif dans la plage de 5 × 10−5 à 5 × 10−9 particules par cm2 par seconde ;
Le , vers 17 h 00 TU, une semaine après le lancement, le moniteur de la sonde à plasma indique que la haute tension de l'instrument se dégrade. L'instrument continue à fonctionner, mais les données fournies sont fournies sous une forme complexe et durant un certain temps ne permet pas d'effectuer des mesures à certains niveaux d'énergie.
- Détecteur de rayonnement piégé (Trapped Radiation Detector), détecteur composé de trois tubes Geiger-Müeller et d'un dispositif électronique utilisé pour détecter le rayonnement cosmique, les protons et les électrons de basse énergie durant le trajet et le survol de la sonde spatiale vers la planète Mars. La sonde Mariner 4 est lancé le vers une orbite héliocentrique. Mariner 4 rencontre des micrométéorites et la transmission des données prend fin le . L'expérience du détecteur de rayonnement piégé (TRD) est conçue pour rechercher des particules magnétiquement chargées à proximité de la planète Mars et pour surveiller l'apparition de rayons cosmiques solaires et d'électrons énergisés dans le milieu interplanétaire, afin d'étudier plusieurs questions scientifiques, comprenant :
- 1° la magnitude et l'orientation du moment magnétique de la planète Mars ;
- 2° l'étendue radiale de l'atmosphère de Mars ;
- 3° les possibilités d'aurores et d'orages magnétiques sur Mars ;
- 4° l'interaction du plasma solaire avec la magnétosphère de Mars, le cas échéant ;
- 5° la relation entre les phénomènes solaires et l'émission de particules énergisés ;
- 6° la propagation de particules chargées dans le milieu interplanétaire ;
- 7° la relation entre l'apparition de particules énergisés dans le milieu interplanétaire et les effets géophysiques et solaires.
- 1° la magnitude et l'orientation du moment magnétique de la planète Mars ;
Le détecteur de rayonnement piégé comprend trois détecteurs Geiger-Müeller, désignés par A, B et C, et un détecteur électronique à barrière de surface de 35 microns avec deux niveaux de discrimination, désignés D1 et D2. L'instrument lui-même, une boîte rectangulaire d'environ 14 × 13 × 7 cm avec 4 tubes en saillie sur un côté, a une masse d'environ 1,2 kg. Les quatre tubes sont les collimateurs coniques des quatre détecteurs et sont placés perpendiculairement au côté de la boîte. L'instrument est monté de manière que l'axe des collimateurs B, C et D, tous parallèles, fasse un angle de 70° avec l'angle de roulis de Mariner 4 et que le collimateur A soit à un angle de 135°. L'axe de roulis est maintenu à l'intérieur de 1° orienté directement vers le Soleil, les collimateurs B, C et D sont orientés à 70° du Soleil, et le collimateur A à 45° dans la direction opposée au Soleil. L'angle au sommet des collimateurs est de 60°, ainsi les particules sont détectées à ± 30° des angles énumérés ci-dessus. Le blindage des parois latérales a une épaisseur minimale qui empêche la pénétration des protons de 50 MeV. Un couvercle en feuille de nickel, avec une épaisseur équivalente à l'air pour les particules alpha de 0,22 mg/cm2, est placée devant le détecteur pour le protéger du rayonnement solaire. Les détecteurs A, B et C sont des compteurs Geiger-Müeller 6213 avec une plage dynamique de 0,6 à 10 000 000 coups par seconde et un facteur géométrique omnidirectionnel de 0,15 cm2. Le détecteur A est sensible aux électrons > 45 keV et aux protons > 670 ± 30 keV. Il a un facteur géométrique unidirectionnel de 0,044 ± 0,005 cm2 en stéradian. Le compteur B est sensible aux électrons > 40 keV et aux protons > 550 ± 20 keV avec un facteur géométrique unidirectionnel de 0,055 ± 0,005 cm2 en stéradian. Le compteur C est sensible aux électrons > 150 keV et aux protons > 3,1 MeV et a un facteur géométrique unidirectionnel de 0,050 ± 0,005 cm2 en stéradian. Le taux de coups de chaque tube Geiger-Müeller est la somme du rayonnement cosmique galactique (0,6 coups par seconde), des électrons, des rayons X, des protons, des particules alpha, etc. qui passent à travers les collimateurs et dans certains cas, jusqu'à la pénétration des parois latérales. Le détecteur D est conçu pour mesurer uniquement les protons et comporte deux niveaux de discrimination. Le niveau D1 (discriminateur inférieur) est sensible aux protons d'énergie de 0,50 à 11,0 MeV et le D2 (discriminateur supérieur) peut détecter des protons de 0,88 à 4,0 MeV. Le détecteur a comme source d'étalonnage l'Américium 241 qui produit des particules alpha de 5,477 MeV à 0,071 coups par seconde à D1 et à 0,059 coups par seconde à D2. La plage dynamique du détecteur D provient de ce débit source jusqu'à 1 000 000 coups par seconde. Son facteur géométrique unidirectionnel est de 0,065 ± 0,003 cm2 de stéradian. Les impulsions de sortie des compteurs Geiger-Müeller sont envoyées à un amplificateur, un dispositif de saturation NPN-PNP complémentaire. À partir de là, les impulsions sont envoyées au sous-système DAS (Data Automation Subsystem). Une particule chargée entrant dans le détecteur électronique libère un nombre d'électrons proportionnel à l'énergie de la perte de particules dans le détecteur. La charge totale des électrons libérés et de la capacité du détecteur donne l'amplitude de l'impulsion de tension de sortie. Les impulsions vont aux préamplificateurs, aux amplificateurs de tension de rétroaction négative stables, puis aux discriminateurs, qui rejettent toutes les impulsions < 1,4 V. Un circuit de sortie et de limitation de vitesse basé sur un multivibrateur monostable limite la cadence maximale à 50 000 coups par seconde. La sortie est ensuite transmise au serveur DAS.
Déroulement de la mission[modifier | modifier le code]
Le lancement survient le à 14 h 22 min 01 s TU avec le lanceur Atlas-Agena D de l'aire de lancement LC-12 de la base de lancement de Cap Canaveral. La coiffe recouvrant Mariner 4 est largué et l'étage Agena D/Mariner 4 se sépare du premier étage Atlas-D à 14 h 27 min 23 s TU. Le premier allumage de l'Agena-D survient de 14 h 28 min 14 s à 14 h 30 min 38 s TU, ce qui place le couple Agena-D/Mariner 4 sur une orbite d'attente terrestre et le second allumage de 15 h 02 min 53 s à 15 h 04 min 28 s TU. injecte Agena-D/Mariner 4 sur une orbite de transfert vers la planète Mars. La sonde spatiale Mariner 4 se sépare de l'étage Agena D à 15 h 07 min 09 s TU et commence ses opérations en mode croisière. Les panneaux solaires sont déployés et la plate-forme de numérisation est déverrouillée à 15 h 15 min 00 s TU et l'acquisition du Soleil a eu lieu 16 minutes plus tard, à 15 h 31 min 00 s TU.
Le pointage vers l'étoile Canopus nécessaire à la bonne orientation de l'engin n'est obtenu le 30 novembre 1964 qu'après trois tentatives sans succès.
Après 7,5 mois de vol impliquant une correction de trajectoire, la sonde spatiale perd son pointage vers l'étoile Canopus, la manœuvre est reportée. Le phénomène est plus tard imputé à la présence d'une poussière lumineuse à proximité du viseur d'étoiles et le viseur est programmé pour être moins sensible à ce type de perturbations à répétition[3]. Le , la correction de trajectoire est réussie. Le le cache de l'objectif de la caméra de télévision est largué. Cette opération doit être effectuée juste avant le survol, mais du fait qu'elle peut provoquer une projection de poussières et à cause de l'incident du viseur d'étoiles de Canopus, l'opération est programmée largement en avance. Le , la Terre entre dans le cône d'émission de l'antenne parabolique fixe, la sonde passe en mode transmission de données.

Mariner 4 survole la planète Mars les 14 et . Le mode de science planétaire est activé à 15 h 41 min 49 s TU le . L'acquisition des images par la caméra, avec des filtres vert et rouge, débute à 00 h 18 min 36 s TU le et 21 photos plus 21 lignes d'une 22e photo sont prises. Les images couvrent une bande discontinue de Mars commençant à environ 40 N, 170 E, jusqu'à environ 35 S, 200 E, puis jusqu'au terminateur à 50 S, 255 E, ce qui représente environ 1% de la surface de la planète. Mariner 4 passe, à l'altitude la plus proche de la planète Mars, à 9 846 km de la surface à 01 h 00 min 57 s TU le . Au moment du survol, la sonde spatiale est à 216 millions de km de la Terre, à une vitesse d’environ 7 km/s à Mars (1,7 km/s par rapport à la Terre). Les images prises durant le survol sont emmagasinées dans le magnétophone de bord. À 02 h 19 min 11 s TU, Mariner 4 passe derrière la planète Mars vu de la Terre et le signal radio est perdu. Le signal est récupéré à 03 h 13 min 04 s TU lorsque la sonde réapparaît. Le mode croisière est alors rétabli. La transmission des images enregistrées vers la Terre commence environ 8,5 heures après la réacquisition du signal, et se poursuit jusqu'au . Toutes les images sont transmises deux fois pour garantir qu'aucune donnée ne soit manquante ou corrompue.
Mariner 4 exécute toutes les activités programmées avec succès et restitue les données utiles depuis le lancement jusqu'à 22 h 05 min 07 s, le , lorsque la Terre est distante de 309,2 millions de km et l’orientation de l'antenne parabolique de la sonde spatiale interrompt temporairement l'acquisition du signal. La sonde spatiale passe alors sur son antenne omnidirectionnelle afin d'être suivie. Le contact intermittent par télémétrie est rétabli le , indiquant que le véhicule spatial et ses instruments fonctionnent.
L'acquisition intégrale des données reprend à la fin de 1967. Le , le détecteur de poussières cosmiques enregistre 17 impacts au cours d'une période de 15 minutes, dans le cadre d'une pluie de micrométéorites qui a temporairement modifié l'attitude de la sonde spatiale et probablement légèrement endommagé le bouclier thermique. Les systèmes de Mariner 4 sont activés en pour des tests de contrôle d'attitude en appui à la mission Mariner 5 vers la planète Vénus[4]. On suppose plus tard que Mariner 4 s'approche à 20 millions de km du noyau ou des débris de la comète D/1895 Q1 (Swift) (pl)[5]. En , les ingénieurs commandent la mise en fonction de la caméra de télévision et un allumage moteur, ce qui n'a pas été fait depuis environ deux ans et demi. Le succès des deux opérations leur permet d'envisager avec confiance la possibilité de missions plus longues vers la planète Jupiter et au-delà[6]. Le , l'alimentation en azote gazeux froid dans le système de contrôle d'attitude est épuisée et, les 10 et , 83 micrométéorites sont détectées, ce qui entraîne une perturbation de l'attitude et une dégradation de la force du signal. Le , les communications avec Mariner 4 sont définitivement perdues. La NASA déclare la mission terminée le .
Résultats[modifier | modifier le code]
Le total des données envoyées par la mission est de 5,2 millions de bits. Toutes les expériences fonctionnent avec succès, à l'exception de la chambre d'ionisation/compteur Geiger qui tombe en panne fin et de la sonde à plasma dont les performances sont dégradées par la défaillance d'une résistance électrique le . Les images envoyées montrent un sol martien avec de nombreux cratères comme sur la Lune (les missions ultérieures montrent que ce n'est pas typique de la planète Mars, mais seulement des plus anciennes régions imagées par Mariner 4). Une pression atmosphérique de surface de 4,1 à 7,0 mbar et des températures diurnes de -100 °C sont estimées et aucun champ magnétique n'est détecté, ce qui permet de conclure que le vent solaire peut avoir une interaction directe avec l'atmosphère martienne et que l'atmosphère et la surface sont entièrement exposées aux rayonnements solaire et cosmique.
-
 La première image de la planète Mars acquise, couvrant 300 (largeur) × 1 200 km (du limbe au bas de la photo).
La première image de la planète Mars acquise, couvrant 300 (largeur) × 1 200 km (du limbe au bas de la photo). -
 La même image reproduite sur la base de données d'origine numérique.
La même image reproduite sur la base de données d'origine numérique. -
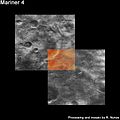
 Une mosaïque à partir des images 1 et 2.
Une mosaïque à partir des images 1 et 2. -
 Une mosaïque à partir des images 9 et 10.
Une mosaïque à partir des images 9 et 10. -
 Une mosaïque à partir des images 11 et 12.
Une mosaïque à partir des images 11 et 12.
.jpg)




Les cratères et l'atmosphère ténue, révélant une planète plutôt inactive et livrée à la rigueur de l'environnement spatial, dissipent les espoirs de découverte de vie intelligente sur Mars, espoirs qui a été entretenus par des siècles de spéculation scientifique ou littéraire. Après Mariner 4, l'hypothèse de la vie martienne se restreint à des formes plus petites et plus simples, et la science-fiction repousse l'habitat des extraterrestres hors du Système solaire.
Notes et références[modifier | modifier le code]
- (en) « Mariner 4 », NSSDC Master Catalog (consulté le )
- (en) Bill Momsen, « Mariner IV - First Flyby of Mars, Some personal experiences » (consulté le )
- (en) « Mariner4: Overview », NASA (consulté le ).
- (en) R.J. Spehalski, « Mariner Mars 1964 Mechanical Configuration » [PDF], JPL, (consulté le ).
- (en) « To Mars- The Odyssey of Mariner IV » [PDF], JPL, (consulté le ).
- (en) « Past Missions - Mariner 3 & 4 », JPL (consulté le ).
- (en) Dr. Tony Phillips, « Has The Mariner Meteor Mystery Been Solved », Science@NASA (consulté le ).
- (en) « Mariner spacecraft - Planetary trailblazers » [PDF], NASA, (consulté le ).
Voir aussi[modifier | modifier le code]
Bibliographie[modifier | modifier le code]
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, Chichester, Springer Praxis, , 534 p. (ISBN 978-0-387-49326-8).


