
Mars Pathfinder
Pour les articles homonymes, voir Pathfinder.
Sonde spatiale

| Organisation |
|
|---|---|
| Domaine | Démonstrateur technologique |
| Statut | Mission achevée |
| Lancement | |
| Lanceur | Delta II 7925 |
| Fin de mission | |
| Identifiant COSPAR | 1996-068A |
| Site | Site officiel |
| Masse au lancement | 870 kg |
|---|---|
| Masse instruments | 25 kg (dont rover) |
| Ergols | Hydrazine |
| Masse ergols | 94 kg |
| Δv | 130 m/s (étage de croisière) |
| IMP | Caméra |
|---|---|
| ASI/MET | Station météorologique |
| APXS | Spectromètre à particules alpha et à rayons X |
Mars Pathfinder est une sonde spatiale de type atterrisseur, développée par l'agence spatiale américaine, la NASA, qui s'est posée sur le sol de la planète Mars le à Ares Vallis, dans la région de Chryse Planitia. L'engin spatial principal est avant tout un démonstrateur technologique à bas coût qui permet de valider le recours à une nouvelle technique d'atterrissage en douceur sur Mars, utilisant des coussins gonflables, et utilise pour la première fois sur Mars un petit robot mobile (astromobile), Sojourner.
Mars Pathfinder est la première mission de la NASA sur le sol de Mars depuis le programme Viking, qui s'est déroulé en 1976, soit 20 ans plus tôt. À l'origine, le projet du centre de recherche Ames, baptisé MESUR, consiste à créer un réseau de 16 stations équipées de capteurs (sismomètre, station météorologique...) amenées sur le sol de Mars par des engins spatiaux très simples. L'envolée du coût de ce projet, les restrictions budgétaires et le refus par le nouvel administrateur de la NASA de développer des missions coûteuses aboutissent à un projet quasiment dépourvu de contenu scientifique qui est confié au Jet Propulsion Laboratory. Mars Pathfinder est la deuxième mission du programme Discovery de la NASA qui rassemble des projets d'exploration du Système solaire à faible coût.
La mission Mars Pathfinder remplit complètement les objectifs limités qui lui ont été fixés et s'achève le . La charge utile, réduite à une station météorologique, une caméra et un spectromètre embarqué sur le rover Sojourner, apporte peu d'informations scientifiques nouvelles. Par contre, pour la première fois, le détail du déroulement d'une mission spatiale est communiqué en temps réel au grand public, image à l'appui, grâce à la généralisation d'Internet, médiatisation qui connaît un énorme succès. Les innovations techniques testées, le système d'atterrissage avec airbags et le recours à un rover seront réutilisés par les missions Mars Exploration Rover lancées en 2003.
Contexte[modifier | modifier le code]


Au début des années 1990 la seule exploration approfondie et in situ de la surface de Mars a été effectuée par les sondes spatiales du programme Viking de la NASA qui se sont posées à la surface de la planète en 1976. Ces atterrisseurs fixes n'ont pu qu'effectuer des analyses limitées sur le site d'atterrissage. Au début des années 1990 les établissements de l'agence spatiale américaine réfléchissent à de nouvelles méthodes d'exploration de la surface de Mars. Le Centre de recherche Ames propose dans le cadre de son projet MESUR (Mars Environmental Survey) de créer un réseau de capteurs sur l'ensemble de la planète en lançant à chaque ouverture de la fenêtre de lancement vers Mars (tous les deux ans environ) quatre petits atterrisseurs fixes lancés par une unique fusée et chargés d'étudier chacun une région donnée. Pour réduire les coûts la technique utilisée par ces sondes pour descendre jusqu'au sol est simplifiée : pas de radar, des rétrofusées à la poussée fixe et un système d'airbag pour annuler la vitesse d'arrivée au sol. Chaque atterrisseur est identique et a une masse de 160 kg. Il est alimenté en énergie par un générateur thermoélectrique à radioisotope doit prendre des photos du site et recueillir des données avec un sismomètre et une station météorologique. Seize sondes devaient être lancées dont les quatre premières en 1996. Leur longévité devait être d'au moins 8 ans pour que l'ensemble du réseau d'instruments puisse fonctionner au moins deux ans de manière simultanée. Un satellite de télécommunications en orbite autour de Mars est ajouté pour permettre le transfert des données vers la Terre. Le coût total sur une décennie s'élève à un milliard de US$. De son côté le centre de recherche Langley propose d'utiliser des pénétrateurs qui seraient largués par un véhicule de descente dérivée des sondes spatiales Viking[1].
Le centre Jet Propulsion Laboratory (JPL) avait étudié auparavant une mission de retour sur Terre d'échantillons du sol de Mars qui utilisait un rover. Les responsables du JPL lancent l'étude d'une version miniaturisée de ce rover. Un ingénieur du JPL, Don Bickler propose un système de suspension articulé reposant sur 6 roues simple qui permet de négocier efficacement les obstacles présents sur le sol de Mars. Un prototype avait été construit en 1989[2].
Le budget du projet MESUR augmente au fur et à mesure des études alors que la NASA est confrontée à des restrictions budgétaires. Les responsables de la NASA décident d'attribuer la première fenêtre de lancement de 1996 à un démonstrateur technologique baptisé SLIM (Surface Lander Investigation of Mars). Celui-ci est chargé de valider les choix techniques de MESUR et ainsi convaincre les responsables de la NASA de déployer le réseau de sondes spatiales. De son côté le Jet Propulsion Laboratory développe un prototype de son rover d'une masse de 7,1 kg et le propose en tant que charge utile de cette première mission. Le rover doit permettre le déploiement du sismomètre au sol. Celui-ci doit être au contact avec le sol pour que les signaux ne soient pas brouillés par des vibrations communiquées à la sonde spatiale par le vent, les variations de température, etc. À l'époque le recours à un bras robotisé pour ce déploiement n'est pas considéré comme une solution viable compte tenu de l'expérience acquise au cours des missions Viking (c'est pourtant cette solution qui sera retenue pour le déploiement du sismomètre InSight lancé en 2018). La NASA donne son accord au développement du projet et le transfère au JPL. Le démonstrateur SLIM est rebaptisé MESUR Pathfinder. Pour des raisons de coût, le sismomètre, raison d'être des stations MESUR, n'est finalement pas embarqué. Il est jugé moins prioritaire que le mini-rover. La durée de vie de l'atterrisseur est limitée à 30 jours (au lieu des 8 ans des stations MESUR) et des panneaux solaires remplacent le générateur thermoélectrique à radioisotope. Finalement le système d'atterrissage à l'aide d'airbags est la seule caractéristique conservée du projet MESUR. Ce dernier est annulé peu après pour des raisons budgétaires et parce que les projets de cette envergure ne rentrent plus dans la stratégie d'exploration du système solaire prônée par le nouvel administrateur de la NASA[3]
Objectifs[modifier | modifier le code]
La mission correspondant au retour des Américains sur Mars depuis vingt ans, ses objectifs sont essentiellement techniques. Il s'agit en effet de tester des procédures qui pourront être utilisées ultérieurement sur des missions ambitieuses sur le plan scientifique et donc plus coûteuses.
- prouver que la devise « faster, better and cheaper » (plus rapide, mieux et moins cher) peut s'appliquer aux missions spatiales (la sonde a été développée en seulement trois ans pour un coût inférieur à 150 millions de dollars, soit cinq fois moins que le projet Viking). Autrement dit, démontrer qu'il est possible de se rendre sur une autre planète en utilisant une technologie à la fois plus complexe et pour un coût raisonnable. En l'occurrence, le coût de la mission Pathfinder s'élève à 280 millions de dollars, en y incluant les coûts annexes (opérations au sol durant la mission et lancement de la sonde) ;

- tester une méthode d'atterrissage totalement innovante : des coussins gonflables géants amortissant l'impact de la sonde avec le sol[Note 1].
Site d'atterrissage[modifier | modifier le code]
Les missions Viking avant d'atterrir sur Mars, avaient été placées sur orbite ce qui avait permis d'étudier et de sélectionner sur place le site d'atterrissage. Mars Pathfinder, après avoir atteint Mars, pénètre directement dans l'atmosphère martienne ce qui impose de sélectionner le site d'atterrissage à l'avance pour placer la sonde spatiale sur la bonne trajectoire. Les contraintes sont toutefois moins fortes que pour les missions Viking car le système d'airbag permet d'atterrir même sur un sol relativement irrégulier. Le recours à des panneaux solaires impose par contre une latitude à laquelle le Soleil se trouve au zénith à la date d'atterrissage. Enfin l'altitude du site doit être suffisamment basse pour donner le temps à la sonde spatiale de réduire suffisamment sa vitesse. Compte tenu de ces contraintes techniques une vingtaine de sites ont été étudiés par la communauté scientifique réunies dans le cadre d'un atelier qui a eu lieu en 1994. Le site d'atterrissage choisi, Ares Vallis, est une ancienne plaine alluviale, située dans l'hémisphère nord de Mars par 19,4° de latitude nord et 33,1° de longitude ouest. Il se trouve à environ 850 kilomètres au sud-est du site d'atterrissage de Viking 1. Le site a été choisi parce qu'on y trouve une grande variété de roches à portée du petit rover dont certaines proviennent sans doute de la région des hauts plateaux qui n'a jusque là jamais été visitée[4].
Caractéristiques techniques[modifier | modifier le code]
La sonde spatiale Mars Pathfinder, qui pèse 895 kg, est constituée de quatre parties distinctes :
- un étage de croisière qui est actif durant la phase de transit entre la Terre et Mars et qui est éjecté avant que la sonde spatiale pénètre dans l'atmosphère de Mars,
- un étage de descente qui comprend principalement un bouclier thermique qui protège la sonde spatiale durant la traversée à grande vitesse et un parachute dont le rôle est d'achever de réduire la vitesse
- le bouclier thermique avant et le parachute sont largués durant la phase finale de la descente. L'atterrisseur se pose sur le sol freiné par des rétrofusées puis des airbags. L'atterrisseur est le cœur de la sonde spatiale : il comprend l'ordinateur embarqué, le système de communication, deux des trois instruments scientifiques.
- le rover Sojourner constitue une extension mobile de l'atterrisseur et emporte un instrument scientifique.
L'ensemble constitué par le module de descente et l'atterrisseur (dont le rover) pèse 570 kg.

Étage de croisière[modifier | modifier le code]
L'étage de croisière, qui mesure 2,65 mètres de diamètre pour 1,5 mètre de haut, a une masse d'environ 300 kg dont 94 kg d'ergols (hydrazine). Son rôle est d'achever la séparation avec le lanceur, de mettre en rotation la sonde spatiale pour la stabiliser durant le transit entre la Terre et Mars et d'entretenir cette rotation, d'effectuer les corrections de trajectoire nécessaires durant cette phase, d'assurer les communications avec la Terre et enfin de placer le module de descente en position pour la rentrée atmosphérique. Une fois cette dernière tâche effectuée, il est largué par le module de descente. Il comprend des panneaux solaires d'une superficie de 4,4 m2 utilisant des cellules photovoltaïques d'arséniure de gallium et fournissent 250 à 450 watts. L'énergie nécessaire à l'étage de croisière est de 178 watts. Pour corriger sa trajectoire et contrôler son orientation, l'étage de croisière utilise 8 moteurs-fusées d'une poussée de 4,4 newtons brûlant de l'hydrazine qui permettent de modifier la vitesse de 130 m/s sur l'ensemble de la mission. Les autres équipements sont une antenne moyen gain fonctionnant en bande X et enfin des capteurs solaires et des viseurs d'étoiles utilisés pour déterminer l'orientation (dérivés de ceux de la sonde spatiale Magellan[5],[6].
-
 Les trois rétrofusées installées sur un bâti reproduisant la forme du bouclier supérieur.
Les trois rétrofusées installées sur un bâti reproduisant la forme du bouclier supérieur. -
 Test des rétrofusées sur une maquette du bouclier supérieur.
Test des rétrofusées sur une maquette du bouclier supérieur. -
 Airbags gonflés et générateurs de gaz.
Airbags gonflés et générateurs de gaz.



Module de descente[modifier | modifier le code]

Le module de descente protège la partie de la sonde spatiale qui doit se poser au sol de la chaleur qui se dégage durant la rentrée atmosphérique puis réduit la vitesse à l'approche du sol en utilisant un parachute puis quelques secondes avant de toucher le sol des rétrofusées. Le module de service comprend un bouclier thermique avant (le plus exposé à la chaleur) et un bouclier thermique arrière dont la forme et la structure sont directement dérivées du module de descente des sondes spatiales Viking. Des équipements mesurent les performances du module durant la descente. Il comprend également un parachute à fente également dérivé des sondes Viking et trois rétrofusées à propergol solide et un radar qui permet dont les données sont utilisées pour déclencher les dernières opérations durant la descente. Le module de descente a une masse d'environ 310 kg[5].
Atterrisseur[modifier | modifier le code]
L'atterrisseur, avant son déploiement au sol, a la forme d'une pyramide tronquée à trois côtés. Chacun des quatre panneaux formant cette pyramide est de forme triangulaire et d'un mètre de côté. Le panneau central sert de support au boitier contenant l'électronique et aux antennes, les trois autres sont reliés à ce panneau par des articulations munies de moteurs lents mais puissants. Lors du déploiement, l'atterrisseur s'ouvre comme une fleur, de sorte que le rover (posé sur l'un des trois panneaux latéraux) puisse s'en extraire. L'ensemble mesure alors 2,75 mètres d'envergure pour une hauteur de 1,5 mètre. Pour le cas où l'atterrisseur ne se poserait pas convenablement sur sa base mais sur l'un de ses panneaux latéraux, un dispositif est prévu lui permettant de le redresser. L'atterrisseur possède trois panneaux solaires triangulaires d'une superficie de 2,8 m2 qui fournissent 1200 watts-heures par jour lorsque l'air est transparent et la moitié de cette quantité lorsque de la poussière est en suspension dans l'air. L'énergie est stockée dans des batteries argent zinc d'une capacité de 40 ampères-heures. L'ensemble des composants électroniques est placé dans un boitier central situé sur le pétale du milieu dans lequel est maintenue une température comprise entre 0 et 20 °C. Ce boitier abrite notamment l'ordinateur embarqué qui utilise un microprocesseur IBM RAD6000 version radio-durcie du PowerPC. Celui-ci dispose d'une mémoire de masse de 128 mégaoctets pour stocker les données et les photos effectuées. Le système de communication qui assure les échanges avec la Terre mais également avec le rover est également stocké dans ce boitier. L'atterrisseur dispose d'une antenne grand gain de 30 cm de diamètre (débit de 2 250 bits par seconde), ainsi qu'une antenne à faible gain[7].
La principale innovation apportée par le Jet Propulsion Laboratory est constituée par le système de ballons servant d'amortisseur durant la dernière partie de la descente. Gonflés par des générateurs de gaz huit secondes avant l'arrivée au sol ils entourent complètement l'atterrisseur. Une fois déployés l'ensemble fait 5,3 mètres de large, pour 4,3 mètres de haut et 4,8 mètres de profondeur. Ces airbags permettent de s'affranchir d'un système propulsif à poussée variable pour arriver au sol ainsi que d'un logiciel de guidage pointu. Il élimine également le risque associé aux irrégularités du terrain. L'atterrissage peut se faire avec une vitesse verticale de 14 m/s, une vitesse horizontale de 20 m/s et en présence de rochers de 50 centimètres de haut. Ce dispositif n'est pas réellement nouveau car il a été utilisé par les soviétiques pour poser certaines de leurs sondes sur la surface de la Lune[8]. Sa mise au point a entraîné de nombreuses modifications. Le système initial qui ne comportait qu'une seule couche de tissu ne pesait que 15 kg mais les tests ont démontré qu'il ne fallait pas moins de quatre couches portant le poids à 85 kg[9].
Rover Sojourner[modifier | modifier le code]

Le rover Sojourner (nommé d'après Sojourner Truth) pèse 10,6 kg et mesure 65 cm de long pour 48 cm de large et 30 cm de haut. Doté de six roues il peut s'éloigner théoriquement jusqu'à 500 mètres de la zone d'atterrissage. Le système de suspension de type rocker-bogie a été mis au point par le JPL et permet à ses roues de 13 centimètres de diamètre de franchir des obstacles de 20 centimètres et gravir des pentes de 45°. Chaque roue dispose dans son moyeu d'un moteur électrique et peut pivoter de manière indépendante. Sa vitesse de déplacement théorique est de 24 mètres par heure mais en pratique il ne dépassera jamais 1 cm/s durant les opérations au sol sur Mars. L'énergie est fournie par un panneau solaire d'une superficie de 0,25 m2. La consommation électrique de ses équipements et de ses instruments est de 16 watts. Durant la nuit il utilise une batterie au lithium non rechargeable. Pour maintenir les équipements à une température acceptable ceux-ci sont isolés sur le plan thermique par des blocs d'aérogel, une matière d'une densité infime mais possédant un très bon pouvoir isolant. Ce dispositif est complété par trois piles contenant chacune 2,6 grammes de plutonium 238 dont la désintégration fournit de la chaleur. Il est relié en bande UHF avec l'émetteur récepteur radio de l'atterrisseur. Pour ses déplacements Sojourner dispose de deux modes de fonctionnement. D'une part il peut recevoir des instructions de la Terre (par l'intermédiaire de l'atterrisseur). L'opérateur analyse les images du terrain environnant pour définir les instructions de déplacement. Il peut également naviguer de manière autonome en analysant la réflexion des rayons lumineux émis par cinq lasers dont il dispose à l'avant. Cette analyse lui permet de distinguer les obstacles et de les contourner. S'il ne parvient pas à trouver un passage, il signale par radio à la Terre qu'il est bloqué[9].
Instruments scientifiques[modifier | modifier le code]



Mars Pathfinder emporte trois instruments : la caméra IMP et la station météorologique ASI/MET installées sur l'atterrisseur et le spectromètre à rayons X alpha proton APXS installé sur le rover Sojourner.
Caméra IMP[modifier | modifier le code]
IMP (Imager for Mars Pathfinder) est une caméra stéréo couleur qui utilise deux optiques pour fournir des images en relief. La caméra est fixée à 1 mètre au-dessus du plateau supérieur de l'atterrisseur au sommet d'un mat télescopique constitué d'un treillis métallique qui est déployé après l'atterrissage. La caméra est orientable sur 360° sur le plan horizontal et de -73° à +83° en élévation. Les deux optiques distantes de 150 millimètres ont une longueur focale de 23 millimètres et un champ de vue de 14,4°. Elles sont protégées de la poussière extérieure par des vitres en silice fondues. Les deux images collectées sont renvoyées sur deux détecteurs de type CCD placées côte à côte comportant chacun 256x256 pixels. Sur le chemin optique est située une roue à filtre comportant quatre paires de filtres atmosphériques, deux paires de filtres pour les images en relief et 11 filtres destinés à mettre en évidence des formations géologiques. Un objectif dioptrique permet de prendre des images rapprochées d'un petit aimant fixé à faible distance de l'IMP pour visualiser les poussières qui adhèrent à l'aimant. La réalisation de la caméra a été pilotée par l'Université de l'Arizona avec des contributions de la société Lockheed Martin, de l'institut Max Planck d'aéronomie de Lindau (Allemagne), de l'Université technique de Brunswick (Allemagne) et de l'institut Niels Bohr à Copenhague (Danemark)[10]
Station météorologique ASI/MET[modifier | modifier le code]
L'instrument ASI/MET (Atmospheric Structure Instrument/Meteorology Package) doit recueillir des données météorologiques telles que la pression, la température, la vitesse et la direction des vents une fois l'atterrisseur au sol. Il doit également mesurer les caractéristiques des couches atmosphériques traversées durant la descente. L'instrument, qui a une masse de 2,41 kg, est développé par le Jet Propulsion Laboratory. Il comprend quatre thermocouples chargés de mesurer la température avec une précision de 0,1 °C. Ceux ci sont fixés sur un mat de 1 mètre de haut qui est placé à la verticale une fois l'atterrisseur au sol. Les thermocouples sont régulièrement espacés et situés au niveau du sol et à 25 cm, 50 cm, 1 m de hauteur. La pression est mesurée par un capteur qui dérive de celui utilisé par les missions Viking. Trois manches à air fixés à différentes hauteurs sur le mat météorologique permettent de mesurer à la fois la direction et la vitesse du vent. La direction est déterminée en prenant régulièrement des photos des manches à air avec la caméra IMP.
Spectromètre à rayons X alpha proton APXS[modifier | modifier le code]
APXS (Alpha Proton X-Ray Spectrometer) est un spectromètre à particules alpha et à rayons X utilisé pour déterminer les éléments chimiques présents dans un échantillon de roche. Pour y parvenir l'instrument bombarde la roche à analyser de particules alpha générées par une source radioactive (curium 244). Les détecteurs de l'instrument analysent alors les particules émises en réaction au bombardement. Un détecteur au silicium analyse les particules alpha renvoyées par les noyaux des atomes de la roche. En mesurant leur énergie maximum il peut déterminer précisément la présence des atomes légers comme le carbone, l'oxygène et l'azote. Il est moins précis pour les éléments les plus lourds. Un deuxième détecteur également au silicium mesure les protons expulsés par le bombardement et permet d'identifier des atomes légers (masse atomique comprise entre 9 et 14) comme le sodium, l'aluminium, le soufre et le magnésium. Le troisième détecteur analyse les rayons X émis par les atomes les plus lourds (à partir du sodium) et permet de déterminer la proportion des éléments présents avec une précision proche du ppm. Tous ces détecteurs ne peuvent fonctionner que si leur température est inférieure à -25 °C ou -35 °C (selon le détecteur). Un refroidisseur à effet Peltier permet d'abaisser la température des détecteurs mais, pour limiter la consommation d'énergie, les responsables de la mission ont préféré ne pas l'utiliser et faire fonctionner l'instrument de nuit, qui sur Mars est caractérisée par des températures très basses (-85 °C). L'instrument est installé sur un bras qui se déploie devant le rover Sojourner pour le positionner le détecteur au contact avec la roche. Pour obtenir des résultats, l'instrument doit rester plaqué contre l'échantillon pendant 10 heures. L'instrument, qui a une masse de 0,56 kg, est une copie de celui embarqué à bord de la sonde russe Mars 96 lui-même dérivé des instruments emportés par les sondes soviétiques Vega et Phobos. Il est fourni par l'Institut Max-Planck de chimie de Mayence (Allemagne). Le détecteur rayons X est fourni par l'Université de Chicago[11] ,[10].
Déroulement de la mission[modifier | modifier le code]
Lancement et transit entre la Terre et Mars (4 décembre 1996 - 4 juillet 1997)[modifier | modifier le code]
Le lancement est reporté à deux reprises, la première fois pour cause de mauvais temps, la seconde à cause d'une panne informatique, qui stoppe le compte à rebours, 4 minutes avant l'allumage des moteurs. Il a finalement lieu le à 06:58:07 (UTC), depuis ESMC / Complexe de lancement 17B. Durant les sept mois que dure son trajet vers la planète rouge, l'étage de croisière (un cylindre de 2,65 m de diamètre pour 1,5 m de hauteur) alimente Pathfinder en énergie (grâce à ses 2,5 m2 de panneaux solaires) et assure les transmissions avec la Terre (grâce à une antenne à gain moyen). Équipé d'un système propulsif (deux séries de quatre tuyères et quatre réservoirs d'hydrazine) pour les corrections de trajectoire, il tourne sur lui-même deux fois par minute de manière à se stabiliser. Grâce à lui, la sonde effectue quatre corrections les 10 janvier, 3 février, 6 mai et 25 juin.
| Réf. schéma |
Heure | Événement | Altitude | Vitesse | |
|---|---|---|---|---|---|
 |
1 | T - 34 min | Largage de l'étage de croisière | 8 500 km | 7,26 km/s |
| 2 | T - 4 min | Début de la rentrée atmosphérique | 125 km | 7,26 km/s | |
| 3 | T - 2 min | Déploiement du parachute | 6-11 km | 350-450 m/s | |
| 4 | T - 100 s | Largage du bouclier thermique avant | 5-9 km | 95-130 m/s | |
| 5 | T - 80 s | Atterrisseur suspendue par filin | 3-7 km | 65-95 m/s | |
| 6 | T - 32 s | Le radar mesure la distance au sol | 1,5 km | 60-75 m/s | |
| 7 | T - 8 s | Les airbags sont gonflés | 300 m | 52-64 m/s | |
| 8 | T - 4 s | Mise à feu des rétrofusées | 50-70 m | 52-64 m/s | |
| 9 | T - 2 s | Largage de l'atterrisseur | 0-30 m | 0-25 m/s | |
| 10 | T + 15 min | Les airbags se dégonflent | au sol | ||
| 11 | T + 75 min | Rétractation des airbags atmosphérique | |||
| 12 | T + 120 min | Transmission des premières données | |||
| T = heure atterrissage. | |||||
Arrivée sur Mars (4 juillet 1997)[modifier | modifier le code]
Descente vers le sol martien[modifier | modifier le code]
La séquence d'atterrissage débute à 8 500 km d'altitude, soit 35 minutes avant le contact avec le sol, par l'éjection de l'étage de croisière, désormais inutile. Contrairement aux sondes Viking, Pathfinder ne se met pas en orbite autour de la planète, il effectue directement sa rentrée, à 130 km d'altitude, avec un angle de 14,2°. La sonde est protégée d'un échauffement excessif par un bouclier thermique de 2,65 mètres de diamètre. Grâce à ce freinage « naturel », la vitesse de Pathfinder est réduite à 1 440 km/h. Alors que le sol n'est plus qu'à 9,4 km, un parachute de 11,5 m de diamètre est éjecté. La vitesse de Pathfinder tombe à 234 km/h. Vingt secondes plus tard, le bouclier thermique est éjecté. Vingt autres secondes s'écoulent avant que la sonde ne soit descendue au bout d'un filin de kevlar de 30 mètres de long, dont l'extrémité est fixée au bouclier supérieur (attaché au parachute). La distance au sol n'est plus que de 6,6 km. Quand elle n'est plus que de 300 m, huit secondes avant le contact avec le sol, la grappe des 24 ballons protecteurs se gonfle tout autour d'elle en moins d'une seconde. Deux secondes plus tard, alors que la sonde n'est plus qu'à 50 m du sol, les trois rétrofusées rivetées sur le bouclier supérieur s'allument, stoppant instantanément l'ensemble en plein ciel. Presque simultanément, la bride de kevlar qui reliait la sonde au bouclier supérieur est sectionnée : Pathfinder parcourt les vingt derniers mètres qui la séparent du sol en chute libre et touche le sol avec une vitesse de 19 m/s, soit 68 km/h. Il s'est alors écoulé quatre minutes et demie depuis le début de sa rentrée dans l'atmosphère, elle touche le sol d'Ares Vallis. Il est alors 2 h 56 min 55 s du matin, heure martienne (soit 16 h 56 min 55 s UTC. Le site d'atterrissage est situé comme prévu à Ares Vallis à 19 kilomètres au sud-ouest du centre de l'ellipse. Les coordonnées sont 19,33° de latitude nord et 33,52° degrés de longitude ouest. Mars Pathfinder a rebondi quinze à vingt fois sur ses airbags (au début jusqu'à 15 m de haut), parfois sur des rochers, avant de se stabiliser[9]. .
De son côté le bouclier supérieur, après le largage de l'atterrisseur, reprend un peu d'altitude sous la poussée des rétrofusées, qui continuent à fonctionner pendant deux secondes afin de l'entraîner le plus loin possible du site d'atterrissage et d'éviter ainsi qu'il ne retombe sur la sonde[Note 2]. Le site d'atterrissage est baptisé Mémorial Carl Sagan en l'honneur de l'astronome et planétologue américain Carl Sagan, qui avait été un grand défenseur de l'exploration spatiale et qui était décédé deux semaines seulement après le lancement de la sonde spatiale[9].

Activation de l'atterrisseur[modifier | modifier le code]
Une antenne faible gain est fixée au sommet de la sonde spatiale et alors qu'il n'y avait qu'une chance sur quatre pour que la sonde spatiale s'immobilise avec sa base posée sur le sol (Si ce n'avait pas été le cas l'ouverture des pétales aurait remis l'atterrisseur à l'endroit), ce qui est arrivé à Mars Pathfinder. L'antenne permet à la sonde spatiale d'informer sans attendre la salle de contrôle que l'atterrissage s'est bien déroulé. Une fois la poussière soulevée par l'atterrissage retombée, les coussins se dégonflent grâce à l'ouverture de valves puis sont rétractés par des câbles en kevlar pour permettre l'ouverture des pétales délimitant le cœur de la sonde spatiale. Les pétales de l'atterrisseur s'ouvrent, exposant ses panneaux solaires. L'atterrissage ayant eu lieu de nuit, il faut attendre le lever du soleil pour permettre aux panneaux solaires de fournir de l'énergie et de prendre le relais des batteries. La caméra est utilisée pour déterminer la position du Soleil, ce qui permet en retour d'orienter l'antenne grand gain vers la Terre et d'envoyer les premières informations détaillées vers la Terre[9].
Durant le premier jour à la surface de Mars, la caméra prend les premières images et quelques relevés météorologiques sont effectués. Les ingénieurs réalisent alors que l'un des coussins ne s'est pas complètement dégonflé et qu'il peut donc gêner le débarquement du rover[13]. Pour résoudre ce problème, ils rehaussent puis abaissent plusieurs fois un pétale de l'atterrisseur pour aplatir le coussin[9]. Les données transmises ce jour-là contiennent celles recueillies durant la descente permettent pour la première fois de disposer d'un profil vertical de température de l'atmosphère martienne durant la nuit. Les données des capteurs enfouis dans le bouclier thermique permettent également de valider la conception de cet équipement qui sera repris par les sondes spatiales martiennes suivantes. Les télémesures indiquent que l'atterrisseur a une inclinaison réduite de 2°[14].

Opérations au sol (4 juillet - 27 septembre 1997)[modifier | modifier le code]

Découverte du site d'atterrissage[modifier | modifier le code]
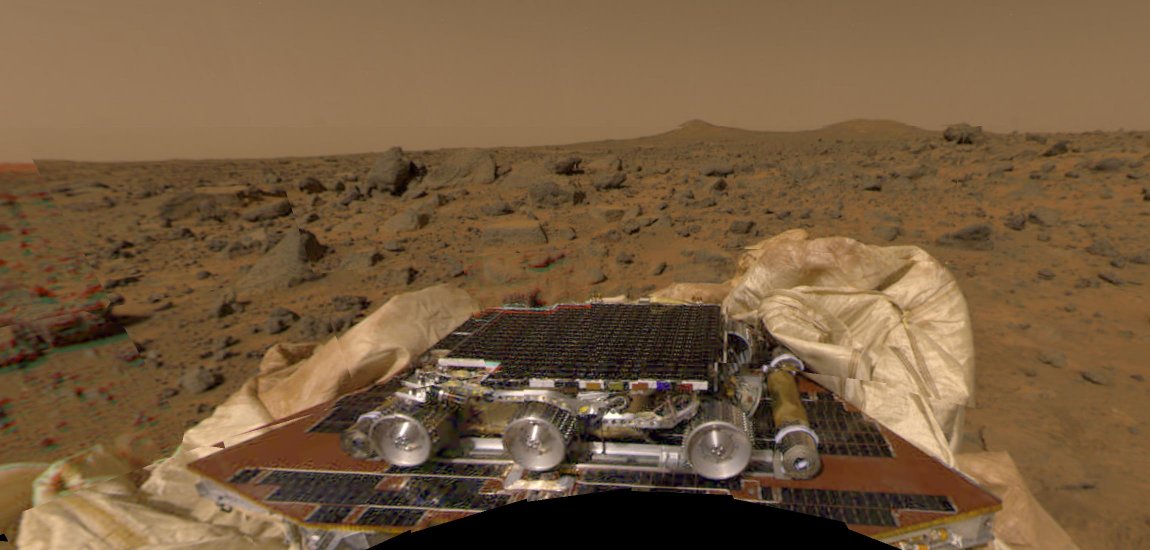
Les photos des alentours montrent une multitude de petits rochers aux formes, textures et couleurs variées qui ravissent les géologues. Par ailleurs, alors que le terrain à proximité est bien plat, des petites ondulations apparaissent à quelques mètres et deux collines hautes de plus de 50 mètres, l'une au sommet conique l'autre avec un sommet aplati, sont visibles sur l'horizon à l'ouest. Éloignées de 860 mètres, elles sont rapidement baptisées Twin Peaks. Sur les flancs de ces collines, on distingue des traces de dépôts, de coulées et des terrasses formées par des écoulements. Au sud du site, une ondulation est en fait la lèvre d'un cratère de 1,5 km de diamètre qui au moment de sa formation a éjecté des roches qui se sont mélangées avec celles transportées sans doute par les inondations. Des petites saillies visibles sur l'horizon correspondent à des reliefs dont le plus éloigné semble se trouver à une quarantaine de kilomètres. Certaines roches sont très pointues, d'autres sont arrondies ou montrent des signes d'érosion par le vent qui n'avaient jamais été observés jusque là sur la planète. Les cailloux arrondis, les rochers souvent penchés ou alignés sur un axe nord-est semblent confirmer la thèse de débris charriés là par des inondations[15].
La couleur du ciel est une surprise pour les scientifiques. Alors qu'aucune tempête de poussière majeure n'a eu lieu depuis des années, celui-ci est de couleur rosé ce qui semble indiquer que la poussière, à l'origine de cette coloration, est présente en permanence dans l'atmosphère. L'opération de rétraction des airbags a fait apparaitre le sol immédiatement sous la surface, qui est plus sombre. D'autres taches sombres sont visibles plus loin sur les images prises par la caméra. Elles semblent indiquer l'endroit où les airbags ont touché le sol avant de rebondir. Les ingénieurs et les scientifiques baptisent rapidement les rochers alentour en leur donnent des noms de personnages de fiction en particulier de dessins-animés : Barnacle Bill, Yogi, Scooby Doo, Casper, Boe, Stimpy, Bullwinkle, Wedge...)[16].
Débarquement du rover[modifier | modifier le code]
Le débarquement du rover Sojourner sur le sol martien ne se fait pas sans anicroche. Deux rampes de débarquement sont déroulées l'une devant, l'autre derrière le rover. Mais la rampe de devant ne touche pas le sol. Celle de derrière est par contre au contact avec le sol mais elle nécessite de piloter le rover en marche arrière sans bénéficier des caméras toutes placées sur l'avant du véhicule. Par ailleurs, un airbag déborde légèrement sur la rampe et les liaisons radio entre Sojourner et Mars Pathfinder sont perturbées. Les ingénieurs décident de repousser au lendemain le débarquement du rover. Quand les communications sont rétablies le lendemain, l'ordinateur de Sojourner a redémarré pour une raison non élucidée mais cet événement a permis de résoudre les problèmes de communication entre le rover et l'atterrisseur. Les ingénieurs déclenchent les charges pyrotechniques qui libèrent le rover de ses entraves et envoie l'instruction de mise en marche. Le rover descend à reculons sur la rampe arrière et touche le sol martien une dizaine de minutes plus tard[9].
Exploration du site d'atterrissage[modifier | modifier le code]


Immédiatement après avoir touché terre, le rover utilise son spectromètre pour déterminer la composition du sol martien au cours de la nuit suivante. Le support télescopique de la caméra IMP est déployé ce qui permet de positionner celle-ci à une hauteur de 1,4 mètre. Le lendemain, Sojourner vient placer en marche arrière son spectromètre APXS au contact du rocher baptisé Barnacle Bill et prend depuis cette position une photo de la sonde spatiale mais les coussins dégonflés obstruent en partie son champ de vue. L'analyse du rocher, une première sur Mars, révèle une proportion surprenante de silicium impliquant la présence de quartz comme l'andésite sur Terre. Mais ce résultat est contesté car il pourrait provenir d'une couche superficielle, sans rapport avec la roche, et créée par l'exposition de celle-ci aux éléments et aux bombardements de particules (vent solaire, rayons cosmiques). Un deuxième rocher baptisé Yogi, de grande taille, de forme arrondie et comprenant de manière intrigante deux coloris, constitue la deuxième cible étudiée. Mais à la suite d'une manœuvre d'approche erronée, puis de plusieurs anomalies successives, il faut quatre jours pour que le spectromètre puisse être apposé contre le rocher. Par la suite, Sojourner analyse un rocher blanc baptisé Scooby Doo puis une portion de sol sableux. Pour la première fois, il utilise pour se déplacer son système de navigation autonome[17].
Durant ce temps, la caméra de Mars Pathfinder est utilisée pour réaliser des panoramas, assister le rover dans sa navigation en réalisant des images de sa position à la fin de chaque journée et photographier les manches à air et les aimants utilisés pour collecter la poussière magnétisée. Les images prises montrent que les roues du rover dévoilent des portions de sol de couleur rosée. Après l'examen d'un rocher baptisé Souffle, les contrôleurs au sol décident de contourner avec le rover l'atterrisseur afin de se diriger vers un groupe de rochers baptisé Rock Garden (le « jardin de rochers »). 38 jours se sont écoulés depuis l'atterrissage lorsque Sojourner atteint son objectif. Le rover, à la suite d'une erreur d'un capteur, entreprend de se hisser sur une roche ce qui porte son inclinaison à 20°. Les mécanismes de protection se déclenchent et la progression du rover est stoppée. Au cours des 20 jours suivants, le rover analyse les roches Sharp, Moe et Half Dome. Le 58e jour, les batteries de Sojourner cessent de fonctionner : le spectromètre ne pourra désormais plus être utilisé qu'en journée lorsque les cellules solaires situées sur le dessus du rover fournissent de l'énergie. Le 76e jour, Sojourner parvient à photographier un champ de petites dunes non visibles par la caméra de Mars Pathfinder[18].
En parallèle, les instruments accumulent les observations de l'atmosphère de Mars. Des photos du crépuscule martien et la mesure de la chute de la production d'électricité par les panneaux solaires sont utilisés pour mesurer la proportion de poussière dans l'atmosphère. La quantité d'eau en suspension en prenant des images du Soleil avec des filtres correspondant aux raies d’absorption de la vapeur d'eau. Des nuages de glace d'eau de couleur bleue sont parfois aperçus dans le ciel. La température à différentes altitudes au-dessus du sol est mesurée de manière continue[19].

Fin de la mission (27 septembre)[modifier | modifier le code]
Après avoir étudié le site de Rock Garden, l'équipe projet envisage d'envoyer Sojourner beaucoup plus loin pour évaluer ses capacités et contribuer à la mise au point de la prochaine génération de rovers. Mais la recharge de la batterie de Mars Pathfinder se dégrade progressivement. Un dernier contact avec la sonde spatiale a lieu le à 10 h 23 heure universelle. Le , la sonde spatiale ne répond plus. La raison exacte de l'arrêt des transmissions n'est pas certaine, mais l'arrêt est probablement dû à l'épuisement de la batterie durant la nuit qui aurait remis l'horloge interne à 0. Lorsque le jour revient et que l'énergie afflue à nouveau, l'ordinateur embarqué n'aurait pas pu situer la Terre et donc pointer l'antenne parabolique vers celle-ci. Une brève liaison est rétablie les 1er et mais sans qu'aucune donnée ne soit transmise. L'électronique étant exposée à une température de plus en plus basse au fil des nuits, il est probable qu'elle a cessé de fonctionner de jour au bout d'un certain temps. Les ingénieurs abandonnent le les tentatives de prise de contact[20].
Résultats de la mission[modifier | modifier le code]

Durant son séjour à la surface de Mars, 17 050 images (dont 550 venant du rover) ont été réalisées et transmises et 8,5 millions de mesures de la pression atmosphérique, de la température et de la vitesse des vents martiens ont été effectuées. Le rover a parcouru une centaine de mètres et effectué 230 manœuvres, réalisant l'analyse chimique de seize roches et parcelles de sol différents, répartis sur une surface d'environ 250 m2. La mission, qui avait une durée prévue de sept jours, a duré 12 fois plus longtemps[21].
Sur un plan purement scientifique, le bilan de la mission qui se voulait avant tout technologique est relativement maigre[22] :
- l'analyse chimique des roches et du sol indique une concentration en silicium importante suggérant que les matériaux d'origine sont différentiés. Les roches analysées ont des caractéristiques différentes de celles des météorites recueillies sur Terre et que l'on suppose d'origine martienne.
- des cailloux et des roches trouvées sur le sol ainsi que des inclusions dans certaines roches tous éléments caractérisés par des formes arrondies suggèrent que Mars a connu par le passé un climat chaud permettant à de l'eau liquide de couler à sa surface.
- des cannelures et rainures visibles sur certaines roches suggèrent qu'elles ont été érodées par des particules de la taille du grain de sable. Des dépôts en forme de dune présents à proximité de la zone d'atterrissage indiquent également la présence de sable.
- la chimie du sol sur le site d'atterrissage est similaire à celle rencontrée par les atterrisseurs Viking 1 et Viking 2.
- le suivi des émissions radio de Mars Pathfinder indiquent que le noyau métallique de Mars a un diamètre compris entre 1300 et 2000 kilomètres.
- la poussière présente dans l'atmosphère est constituée de particules magnétisées de 1 micron de diamètre. Il est probable que le minéral magnétique est de la maghémite une des variantes de l'oxyde de fer qui a été déposée et a cimenté les particules de poussière sous l'effet du froid et de la sécheresse. Le fer proviendrait du lessivage des roches durant la phase chaude qu'aurait connu Mars.
- des tourbillons de poussière ont été fréquemment observés et suggèrent qu'ils forment le mécanisme injectant la poussière dans l'atmosphère de Mars.
- les photos prises montrent la présence de nuages de glace d'eau dans la basse atmosphère en début de journée. Ceux-ci se dissipent lorsque l'atmosphère se réchauffe.
- des variations brutales de température ont été mesurées dans la matinée ce qui suggère que l'atmosphère est réchauffée par la surface de la planète et que cette chaleur est diffusée par des courants ascendants.
- le climat est similaire à celui du site d'atterrissage de Viking 1 avec des variations rapides de pression et de température, un affaiblissement des vents durant la nuit et en général des vents faibles. Les températures en surface sont en général de 10 °C plus chaudes que sur le site de Viking 1.
- l'atmosphère présente une teinte rose pale due à la présente des particules fines de poussière dans la basse atmosphère, phénomène déjà constaté sur les sites d'atterrissage des sondes spatiales Viking. La taille et la forme des particules de poussière et la quantité de vapeur d'eau présente dans l'atmosphère sont similaires à ce qui a été constaté par les atterrisseurs Viking.
Rovers suivants[modifier | modifier le code]
Même si son rayon d'action était très limité, Sojourner a été le tout premier engin à se déplacer sur le sol martien. Depuis, cinq autres rovers, les quatre premiers développés par l'agence spatiale américaine, et le rover chinois Zhurong, ont atterri sur Mars :
- Spirit : il fait partie des deux rovers du projet Mars Exploration Rover (MER). Ayant quitté la Terre le , il s'est posé sur Mars le . Actif jusqu'en 2009, il a parcouru 7,7 km avant de s'enliser dans une dune.
- Opportunity : le jumeau de Spirit a – comme lui – quitté la Terre durant l'été 2003 et s'est posé sur Mars en . Mais il s'est montré beaucoup plus résistant que lui puisqu'il est resté actif pendant plus de quatorze ans, parcourant ainsi plus de 45 km. Il a été mis en sommeil par la NASA le à la suite de violentes tempêtes, qui ont encrassé ses panneaux solaires[23]. En , la NASA annonce officiellement sa mise hors service[24],[25].
- Curiosity : lancé le , plus lourd et plus puissant que les deux "MER", ce rover n'est pas, comme eux, alimenté par des panneaux solaires mais par un générateur nucléaire, ce qui l'autorise à fonctionner par toutes saisons et de jour comme de nuit. Ayant atteint la surface de Mars le , il a parcouru 23,33 km le [26].
- Perseverance : Après un lancement le 30 juillet 2020, ce nouveau rover s'est posé le 18 février 2021 à l'intérieur du cratère Jezero de 49 kilomètres de diamètre près de la bordure nord-ouest de celui-ci. Avec une architecture proche de celle de son prédécesseur, Perseverance possède davantage d'instruments scientifiques lui permettant de découvrir des traces de vie.
- Zhurong : (en chinois 祝融, Zhùróng) est le premier rover martien chinois appartenant à la mission Tianwen-1 lancée vers Mars le à 12 h 41 (UTC+8), depuis la base de lancement de Wenchang[27]. Il s'est posé le [28], faisant de la Chine le deuxième pays à réussir un atterrissage sur Mars et à établir des communications depuis la surface martienne, après les États-Unis. Zhurong a été déployé avec succès le 22 mai 2021, à 02:40 UTC[29],[30].
Dans la culture populaire[modifier | modifier le code]
- dans le film Planète rouge, des astronautes en péril sur Mars utilisent des pièces de Sojourner pour fabriquer une radio improvisée et communiquer avec leur vaisseau spatial.
- dans la série Star Trek: Enterprise, Sojourner apparait brièvement en tant que monument historique.
- dans le roman Seul sur Mars ainsi que son adaptation cinématographique, un astronaute abandonné sur Mars voyage jusqu'à Pathfinder pour récupérer et réparer la sonde afin de communiquer avec la Terre.
Notes et références[modifier | modifier le code]
Notes[modifier | modifier le code]
- Cette méthode n'étant toutefois applicable qu'avec des engins de petite taille, elle ne peut être généralisée.
- Cette méthode sera reprise pour l'atterrissage de Curiosity en 2012.
Références[modifier | modifier le code]
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 442-443
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 443
- (en) Philippe Labrot, « Une chance tous les 20 ans : MESUR », sur Site officiel SEIS-INSIGHT, Institut de physique du globe de Paris (consulté le )
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 451-452
- Mars Pathfinder Mission (Golombek), p. 3954
- (en) « Mars Pathfinder Fact Sheet », NASA (consulté le )
- Mars PathfinderLanding Press kit, p. 28
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 445
- Philippe Labrot, « Mars Pathfinder », sur Site de P. Labrot (consulté le )
- (en) « Mars Pathfinder Instrument Descriptions », sur Site officiel Mars Pathfinder, NASA,
- Philippe Labrot, « Mars Pathfinder - Les instruments scientifiques », sur Site de P. Labrot (consulté le )
- (en) « Mars Pathfinder :Entry Descent and Landing », sur Site officiel Mars Pathfinder, NASA (consulté le )
- Photo : http://www.astrocosmos.net/articles/mission/pathfinder-sojourner.jpg
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 454
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 454-455
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 455-456
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 456-457
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 457-458
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 458
- Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, p. 460
- Golombek 1997, p. 1
- (en) NASA, Press kit : Mars Polar Lander/ Deep Space 2, NASA, (lire en ligne), p. 14
- Opportunity Updates
- La NASA confirme la mort du robot martien Opportunity, Le Monde, 13 février 2019.
- (en) « NASA's Record-Setting Opportunity Rover Mission on Mars Comes to End », sur nasa.gov, (consulté le ).
- On peut régulièrement suivre son kilométrage sur un site du JPL :http://mars.nasa.gov/msl/mission/whereistherovernow/
- Andrew Jones, « Tianwen-1 launches for Mars, marking dawn of Chinese interplanetary exploration », SpaceNews, (lire en ligne, consulté le )
- Steven Lee Myers et Kenneth Chang, « China's Mars Rover Mission Lands on the Red Planet », The New York Times, (lire en ligne
 , consulté le )
, consulté le )
- Rémy Decourt, « Mars : premiers tours de roues pour le rover Zhurong », sur Futura Sciences,
- Lei Zhao, « China's Zhurong rover moves onto Martian surface to begin scientific operations », China Daily, (lire en ligne, consulté le )
Bibliographie[modifier | modifier le code]
NASA
- (en) NASA, Mars Pathfinder Landing, (lire en ligne)Dossier de presse fourni par la NASA pour l'atterrissage de Mars Pathfinder
- Articles sur le déroulement de la mission et résultats
- (en) Mathew P. Golombek, T. Economou, W. M. Folkner et al., « The Mars Pathfinder Mission », Journal of Geophysical Research, vol. 102, no E2, , p. 3953-3965 (DOI 10.1029/96JE02805, lire en ligne) — Présentation de la mission
- (en) M. P. Golombek, T. Economou, W. M. Folkner et al., « Overview of the Mars Pathfinder Mission and Assessment of Landing Site Predictions », Science, vol. 278, no 5344, , p. 1743-1748 (DOI 10.1126/science.278.5344.1743, lire en ligne) — Synthèse des résultats de la mission Mars Pathfinder
- (en) P. H. Smith, J. F. Bell III, N. T. Bridges et al., « Results from the Mars Pathfinder Camera », Science, vol. 278, no 5344, , p. 1758-1765 (DOI 10.1126/science.278.5344.1758, lire en ligne) — Synthèse des résultats de la mission Mars Pathfinder
Autres ouvrages
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 2 Hiatus and Renewal 1983-1996, Chichester, Springer Praxis, , 535 p. (ISBN 978-0-387-78904-0)Historique et déroulement détaillé des missions interplanétaires entre 1982 et 1996
- (en) Peter J. Westwick, Into the black : JPL and the American space program, 1976-2004, New Haven, Yale University Press, , 413 p. (ISBN 978-0-300-11075-3) — Histoire du Jet Propulsion Laboratory entre 1976 et 2004
- (en) Erik M. Conway, Exploration and engineering : the Jet propulsion laboratory and the quest for Mars, Baltimore, Johns Hopkins University Press, , 418 p. (ISBN 978-1-4214-1605-2, lire en ligne) — Histoire du programme d'exploration martien du Jet Propulsion Laboratory
Voir aussi[modifier | modifier le code]
Articles connexes[modifier | modifier le code]
- Exploration du système martien
- Mars Exploration Rover
- Spectromètre à particules alpha et à rayons X
- Astromobile
- Programme Discovery et Programme Mars Surveyor
- MESUR projet abandonné à l'origine de la mission Mars Pathfinder
- Mutex (Cet article détaille le bug informatique dont fut victime la mission).
Liens externes[modifier | modifier le code]
- (en) Site officiel de la NASA
- Description de la mission Pathfinder sur le site de Philippe Labrot.
- (en) Toutes les photos de la mission sur le site Photojournal du JPL).


{kind=link}