
Lunar Reconnaissance Orbiter
_4.jpg)
| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Lunar Precursor Robotic |
| Domaine | Étude de la Lune |
| Type de mission | Orbiteur |
| Statut | Opérationnel |
| Lancement | à 21 h 32 TU |
| Lanceur | Atlas V 401 |
| Durée de vie | 1 an (mission primaire) |
| Identifiant COSPAR | 2009-031A |
| Protection planétaire | Catégorie II[1] |
| Site | [1] |
| Masse au lancement | 1 916 kg |
|---|---|
| Propulsion | Chimique |
| Masse ergols | 898 kg |
| Δv | 1,87 km/s |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 685 W |
| Orbite | Orbite circulaire |
|---|---|
| Altitude | 50 km |
| LROC | Caméras |
|---|---|
| CRaTER | Détecteur de rayons cosmiques |
| DLRE | Radiomètre infrarouge |
| LAMP | Spectromètre ultraviolet |
| LEND | Détecteur de neutrons |
| LOLA | Altimètre laser |
| Mini-RF | Radar |
Lunar Reconnaissance Orbiter (LRO) est une sonde spatiale de type orbiteur de la NASA lancée en 2009 dont l'objectif est d'étudier la Lune depuis son orbite. LRO fait partie du programme Lunar Precursor Robotic dont l'objectif est d'effectuer des reconnaissances approfondies de notre satellite notamment pour préparer les missions habitées du programme Constellation d'exploration lunaire annulé le par le président Obama.
LRO, dont la masse totale est de 1 916 kg, embarque sept instruments scientifiques notamment des caméras en lumière visible, un radiomètre infrarouge, un spectromètre ultraviolet et différents instruments destinés à détecter la présence d'eau. LRO est placée sur une orbite particulièrement basse de 50 km autour de la Lune qui lui permet d'effectuer des observations extrêmement détaillées de la surface. Le système de télécommunication est dimensionné pour transférer le très grand volume de données qui en découle. Les objectifs de la sonde sont de dresser une carte à haute résolution de la Lune, tenter de détecter la présence d'eau au niveau des régions polaires, définir un système géodésique complet et évaluer l'intensité du rayonnement ionisant d'origine cosmique.
LRO est lancée le par un lanceur Atlas V depuis la base de lancement de Cap Canaveral, avec une deuxième sonde lunaire Lunar Crater Observation and Sensing Satellite (LCROSS) ayant une mission complémentaire. Les instruments de la sonde permettent de dresser une carte topographique (avec le relief) et une carte bidimensionnelle de la Lune d'une précision inégalée. La mission, d'une durée initiale d'un an, est prolongée à plusieurs reprises.
Contexte[modifier | modifier le code]
Mission de reconnaissance pour le programme Constellation[modifier | modifier le code]

Lorsque le projet de la sonde LRO est mis au point, la NASA prévoit d'envoyer des astronautes sur la Lune vers 2020 dans le cadre de son programme Constellation : celui-ci constitue la concrétisation de la stratégie spatiale américaine à long terme définie par le président George W. Bush en , énoncé dans le document Vision for Space Exploration. Le programme Constellation a pour objectif l’envoi d’astronautes sur la Lune vers 2020 pour des missions de longue durée (7 jours au lieu de 3 pour le programme Apollo). On envisage des sites d'atterrissage dans les régions polaires éclairées pratiquement en permanence pour bénéficier à la fois d'un ensoleillement plus important, donc de nuits plus courtes et de températures moins extrêmes. Il est également envisagé dans une perspective plus lointaine d'exploiter les dépôts de glace d'eau qui existent peut-être sous ces latitudes dans les zones en permanence à l'ombre.
LRO constitue avec son compagnon LCROSS la première mission préparatoire de ce projet. Ces deux engins spatiaux font partie du programme Lunar Precursor Robotic qui regroupe plusieurs missions de sondes spatiales qui doivent être lancées vers la Lune pour préparer les futurs vols habités. En 2010, le programme Constellation est annulé pour des raisons financières.
Objectifs de la mission[modifier | modifier le code]
Les principaux objectifs de la mission sont[2] :
- Réaliser un système géodésique complet de la Lune.
- Évaluer l'intensité du rayonnement ionisant d'origine cosmique.
- Explorer les régions polaires de la Lune en recherchant d'éventuels dépôts de glace d'eau et les zones éclairées en permanence.
- Réaliser une cartographie à haute résolution notamment pour faciliter la recherche de futurs sites d'atterrissage en fournissant leurs caractéristiques.
Déroulement de la mission[modifier | modifier le code]
Lancement et injection en orbite lunaire[modifier | modifier le code]

La fenêtre de lancement est choisie de manière que le plan orbital de la sonde autour de la Lune qui en résulte coïncide avec l'azimut du Soleil au moment des solstices lunaires. En effet, l'un des objectifs de LRO est d'identifier les zones polaires situées en permanence à l'ombre ou au contraire éclairées en permanence. Lorsque le plan orbital coïncide avec l'orientation du Soleil durant les solstices lunaires, la sonde peut déterminer les conditions les plus extrêmes d'ensoleillement rencontrées par les régions polaires[3].
LRO est injectée sur une orbite de transfert vers la Lune par un lanceur Atlas V de type 401. Le lanceur emporte également la sonde LCROSS dont la mission est de tenter de détecter la présence d'eau à l'intérieur des cratères situés dans les zones polaires de la Lune. Après quatre jours de navigation et une seule correction de trajectoire à mi-course (28 m/s), la sonde LRO utilise ses propulseurs à quatre reprises avec un Delta-v de respectivement 567 m/s, 185 m/s, 133 m/s et 41 m/s pour se placer sur une orbite elliptique de 30 × 216 km. La sonde reste sur cette orbite durant 60 jours pendant lesquels les instruments scientifiques sont activés et calibrés (phase de recette). Une dernière impulsion place la sonde sur son orbite de travail de type polaire circulaire à une altitude de 51 km au-dessus du sol lunaire. Cette orbite particulièrement basse est retenue pour permettre une étude très détaillée du sol lunaire[4],[5].
Déroulement des opérations[modifier | modifier le code]
À l'issue de la phase de recette de 60 jours, la sonde entame les opérations de recueil des données scientifiques. Il est prévu que l'ensemble des objectifs soient atteints environ un an après la date de lancement. Chaque jour la sonde transmet environ 460 gigaoctets de données (90 % sont générées par les caméras en lumière visible). Celles-ci sont transmises en bande Ka avec un débit de 100 millions de bits par seconde à la seule station de réception terrestre de White Sands qui est en visibilité depuis LRO de 2 à 6 fois par jour durant 45 minutes[6].
Du fait des mouvements relatifs de la Terre, du Soleil et de la Lune, la Terre est visible de la sonde de manière continue durant deux jours deux fois par mois et le Soleil de manière continue durant un mois deux fois par an. Au moment des solstices lunaires (deux fois par an), la sonde effectue un mouvement de rotation de 180° pour pouvoir présenter la face efficace de son panneau solaire au Soleil. Sur son orbite, la sonde alterne période éclairée et période à l'ombre, chacune d'une durée de 56 minutes en moyenne. Toutefois, sur la durée de sa mission, la sonde connaît plusieurs périodes d'éclipse totale ou partielle de plusieurs heures liées à l'interposition de la Terre entre la Lune et le Soleil. La plus sévère se situe le (éclipse totale de 1 h 41 min et partielle de 3 h 40 min) durant laquelle les accumulateurs doivent subir une décharge de 90 %[7]. Du fait du champ de gravité irrégulier de la Lune, l'excentricité de l'orbite est progressivement modifiée et au bout de 60 jours la sonde risque de heurter la surface de la Lune. LRO consacre la première année un Delta-v de 150 m/s pour maintenir son orbite[8]. Les corrections d'orbite sont effectuées une fois toutes les quatre semaines tandis que la désaturation des roues de réaction est réalisée toutes les deux semaines[6].
La sonde dispose d'une marge de carburant suffisante (Delta-v de 65 m/s) pour lui permettre d'être prolongée au moins de trois ans sur une orbite de 30 × 216 km. Peu après la fin de la mission et l'épuisement de son carburant, la sonde ne pouvant plus corriger son orbite, doit percuter le sol lunaire[9].
Principales caractéristiques de la sonde[modifier | modifier le code]
La sonde lunaire LRO pèse 1 916 kg dont 898 kg de carburant permettant de fournir un Delta-v de 1 270 m/s. Elle est alimentée en énergie par un panneau solaire orientable qui lui fournit 685 watts stockés dans des accumulateurs lithium-ion. Une fois le panneau solaire déployé, le satellite a une envergure de 4,30 m sur 3,25 m, sans tenir compte de l'antenne à grand gain déployée au bout d'un mât qui accroît l'envergure de 2,59 mètres. Les données recueillies sont transmises au centre de contrôle en bande Ka (grand débit) ou en bande S avec un débit qui peut atteindre 100 Mo par seconde. Le volume total par jour peut atteindre 461 Go[10]. Les opérations de cartographie génèrent entre 70 et 100 téraoctets d'images.
La sonde dispose de 4 moteurs-fusées de 80 newtons de poussée utilisés pour les manœuvres d'insertion en orbite et baptisés en conséquence IT (insertion thrusters). Ces propulseurs se présentent en deux groupes de 2. Un seul des deux groupes est suffisant pour permettre la manœuvre exigeant le plus de poussée durant l'insertion en orbite. Par ailleurs, 8 moteurs-fusées de 20 newtons de poussée sont utilisés pour les corrections fines d'orbite ainsi que pour le contrôle d'attitude. Ils sont de ce fait baptisés AT (attitude thrusters). La sonde est stabilisée sur 3 axes, c'est-à-dire que son orientation est fixe dans un référentiel stellaire. Le contrôle d'attitude est réalisé à l'aide de deux viseurs d'étoiles, d'une centrale à inertie et de 4 roues de réaction. En cas de perte de contrôle, dix capteurs solaires prennent le relais en « mode de survie » pour fournir une orientation de référence approchée[11].

|

| |
Schéma de la sonde : A : Antenne grand gain ; B : Viseur d'étoiles ; C Panneaux solaires ; D Radiateur ; E : propulseurs ; 1 : Détecteur de rayons cosmiques CRaTER ; 2 : Caméra à objectif grand angle LROC ; 3 : Spectromètre imageur ultraviolet LAMP ; 4 : Altimètre laser LOLA ; 5 : Caméra à téléobjectif LROC ; 6 : Détecteur neutrons LEND ; 7 : Radiomètre infrarouge DLRE ; 8 : radar Mini-RF.
| ||
Les instruments scientifiques[modifier | modifier le code]
La sonde emporte six instruments scientifiques et un démonstrateur technologique[12] :
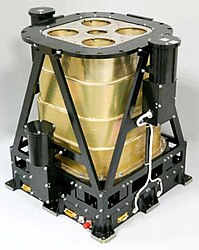
- CRaTER (Cosmic Ray Telescope for the Effects of Radiation), le but principal de l'instrument CRaTER est de mesurer l'intensité du rayonnement ionisant d'origine cosmique et ses impacts biologiques. Il s'agit plus particulièrement de mesurer les particules chargées ayant une énergie supérieure à 10 MeV. CRaTER est constitué d'un télescope recueillant les ions et les électrons et dans une moindre mesure les neutrons, de trois paires de détecteurs en silicium - l'un épais l'autre mince - chargés de mesurer l'énergie des particules et de couches de plastiques reproduisant les caractéristiques de tissus humains mous (tissue-equivalent plastic ou TEP). Les détecteurs permettent de mesurer l'énergie dissipée lorsque les particules chargées les traversent (l'énergie perdue mesurée est comprise entre 0,1 keV/μm et 2,2 MeV/μm)[13]. Le TEP permet de mesurer comment le tissu humain réagit aux radiations, une information importante pour les futures missions habitées qui doivent s'aventurer loin de la Terre[14].
- DLRE (Diviner Lunar Radiometer Experiment), ce radiomètre infrarouge doit permettre de mesurer les températures à la surface de la Lune. Les astronautes participant à des missions longues sur le sol lunaire doivent notamment survivre à la nuit lunaire alors que toutes les missions du programme Apollo se sont déroulées de jour et à une latitude favorable car proche de l'équateur. Un objectif important assigné à cet instrument est de mesurer la température des zones en permanence à l'ombre pour déterminer dans quelle mesure celles-ci peuvent stocker de l'eau[15].
- LAMP (Lyman Alpha Mapping Project), ce spectromètre utilise le rayonnement ultraviolet lointain (1 200-1 800 Angström) en provenance des étoiles pour cartographier d'éventuels dépôts de glace d'eau qui sont situés dans les cratères en permanence à l'ombre des régions polaires de la Lune. Un autre objectif est de déterminer la composition minéralogique de la surface de la Lune ainsi que celle de l'atmosphère ténue qui l'entoure. Enfin, la sonde doit valider la technique de la Vision Assistée Lyman-Alpha (Lyman-Alpha Vision Assistance ou LAVA) qui a recours à la lumière des étoiles et au rayonnement ultraviolet émanant du ciel pour voir dans les zones non éclairées. Cette technique peut être par la suite appliquée aux astromobiles et aux astronautes permettant d'économiser l'énergie consommée par l'éclairage. LAMP est basé sur l'instrument ALICE UV installé à bord de la sonde New Horizons en route vers Pluton[16] ;
-
 Spectromètre ultraviolet LAMP.
Spectromètre ultraviolet LAMP. -
 Détecteur de rayons cosmiques CRaTER.
Détecteur de rayons cosmiques CRaTER. -
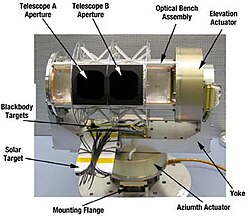 Radiomètre intrarouge DLRE.
Radiomètre intrarouge DLRE.



- LEND (Lunar Exploration Neutron Detector), ce détecteur de neutrons permet de mesurer des flux neutronique ayant une énergie allant jusqu'à 15 MeV. Il doit permettre de cartographier la distribution de l'hydrogène présent en surface et à moins de 1 mètre de profondeur en mesurant la température neutronique (énergie du neutron comprise entre 0,4 eV et 100 eV) avec un pouvoir de résolution de 10 km. LEND doit être capable de détecter d'éventuels dépôts de glace d'eau enfouis dans les régions polaires près de la surface. L'eau constitue une ressource critique pour les projets de séjour d'astronautes de longue durée. LEND doit également fournir des informations sur l'intensité du rayonnement ionisant prenant sa source dans les neutrons énergétiques. LEND est un instrument proche de HEND embarqué depuis 2001 sur l'orbiteur martien 2001 Mars Odyssey. Il comprend toutefois un collimateur passif qui lui permet d'obtenir un pouvoir de résolution remarquable[17] ;
- LOLA (Lunar Orbiter Laser Altimeter), l'altimètre laser LOLA doit permettre de définir un modèle topographique et un système géodésique lunaire précis. L'objectif, à l'époque de la conception de la sonde, est de permettre d'identifier des sites d'atterrissage des futures missions lunaires garantissant un risque limité et de pouvoir préparer les explorations à mener à partir du point d'atterrissage. LOLA doit également contribuer à mettre en évidence les zones en permanence à l'ombre dans les régions polaires. LOLA comprend un laser émettant sur la longueur d'onde 1,064 nm qui envoie simultanément 5 impulsions lumineuses en éventail 28 fois par seconde. LOLA mesure le temps de vol de l'impulsion, l'étalement de l'impulsion lumineuse (qui dépend de la rugosité du sol) et l'énergie retournée (la réflectance). LOLA peut ainsi déterminer à la fois l'altitude, la rugosité et la pente à la fois dans l'axe de progression de la sonde sur son orbite et par le travers de celle-ci. LOLA est une évolution des instruments Mercury Laser Altimeter (MLA) embarqué à bord de l'orbiteur martien Messenger et Mars Orbiter Laser Altimeter (MOLA) embarqué à bord de Mars Global Surveyor. Sa précision verticale est toutefois 3,5 fois meilleure que celle de MOLA et la fréquence de mesure est 32 fois plus importante[18].
- LROC (Lunar Reconnaissance Orbiter Camera), cet instrument doit fournir les informations nécessaires sur les futurs sites d'atterrissage et les zones éclairées en permanence. LROC comprend une paire de caméras avec téléobjectif à haute définition fournissant des images de 5 km de côté avec une résolution de 0,5 mètre (NAC) et une caméra grand angle fournissant des images de 60 km de côté avec une résolution de 100 mètres (WAC). LROC doit permettre d'établir une carte des régions polaires avec un niveau de détail de 1 mètre, établir une carte globale de la Lune, réaliser des photos multispectrales et tridimensionnelles. Les sites d'atterrissage des missions Apollo sont survolés et des photos des modules lunaires abandonnés doivent pouvoir être prises. LROC est une version modifiée des caméras ConTeXt et MARs Color Imager (MARCI) de la sonde Mars Reconnaissance Orbiter fournies par la société Malin Space Science Systems[19].
- Mini-RF, est un radar léger expérimental qui doit permettre de valider dans le cadre de cette mission, ses capacités à détecter la glace d'eau dans les zones situées à l'ombre avec une résolution comprise entre 30 et 150 mètres. Compte tenu des longueurs d'onde utilisées en bande X (8-12 GHz) et en bande S (2 GHz), Mini-RF doit également pouvoir retourner des informations sur la rugosité du sol. Une version moins sophistiquée de cet instrument est embarquée sur la sonde indienne Chandrayaan-1 et une expérience de mesures conjointes doit être menée.
-
 Détecteur de neutrons LEND.
Détecteur de neutrons LEND. -
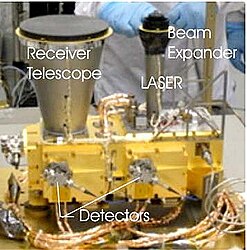 Altimètre laser LOLA.
Altimètre laser LOLA. -
 Caméras en lumière visible LROC.
Caméras en lumière visible LROC.



Développement de la sonde spatiale et déroulement de la mission[modifier | modifier le code]
_launches_with_LRO_and_LCROSS.jpg)
La validation préliminaire de la conception (Preliminary design review - PDR) de la sonde développée par le Goddard Space Flight Center est réalisée en février 2006 et la conception définitive (Critical Design Review - CDR) est validée en [20]. La sonde est lancée le à 21 h 32 TU par un lanceur Atlas V depuis la base de lancement de Cap Canaveral. En , la mission initiale s'achève. La NASA décide de la prolonger en conservant la même orbite[21]. En , l'équipe chargée de la mission désactive le radar Mini-RF, qui a rempli ses objectifs en effectuant plus de 400 relevés mais à la suite d'une défaillance ne produit plus de résultats exploitables[22].
Résultats scientifiques[modifier | modifier le code]
La sonde renvoie ses premières images haute résolution de la surface lunaire le [23]. Ces clichés très prometteurs couvrent une région située à l'est du cratère d'impact Hell E, au sud de la mer des Nuées. En , les données thermiques recueillies par le DLRE (Diviner Lunar Radiometer Experiment), viennent confirmer la présence de zones extrêmement froides situées en permanence à l'ombre au pôle sud de la Lune. Des températures allant jusqu'à - 248 °C sont mesurées par l'instrument. Il s'agit de l'une des températures les plus basses enregistrées jusque-là dans le Système solaire, inférieure à celle de la surface de Pluton[24]. Les instruments optiques de LRO fournissent des images détaillées des sites des missions lunaires du programme Apollo et les déplacements des astronautes à la surface de la Lune sont repérés sur les photos prises. Ces informations permettent, entre autres, de fournir le contexte géologique des échantillons de sol lunaire ramenés sur Terre[25]. LRO parvient également à localiser et photographier la sonde soviétique Lunokhod 1 dont le rétroréflecteur laser se révèle parfaitement fonctionnel lors d'un test effectué depuis les États-Unis[26]. LRO joue un rôle vital dans la mission jumelle LCROSS en fournissant à l'aide de ses instruments la topographie de la région dans laquelle LCROSS doit s'écraser pour remplir ses objectifs, c'est-à-dire les régions susceptibles d'abriter de l'eau compte tenu de leur température et de l'abondance en hydrogène[27]. Le spectrographe ultraviolet lointain LAMP (Lyman Alpha Mapping Project) embarqué à bord de l'orbiteur lunaire semble indiquer la présence de 1 à 2% de glace d'eau en surface au fond des cratères d'impact alors que les scientifiques s'attendaient à ce que celle-ci, du fait du bombardement du vent solaire, ne se conserve que sous la surface. Par ailleurs la porosité du sol atteint 70% contre 40% dans les régions éclairées[28].
-
 Photo du pôle nord réalisée à partir de 983 photos de LROC prises lorsque le pôle bénéficie de l'exposition la plus favorable au Soleil. Elle doit permettre d'identifier les zones en permanence à l'ombre.
Photo du pôle nord réalisée à partir de 983 photos de LROC prises lorsque le pôle bénéficie de l'exposition la plus favorable au Soleil. Elle doit permettre d'identifier les zones en permanence à l'ombre. -
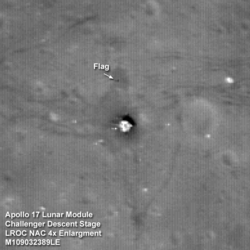 Site d'alunissage d'Apollo 17, photographié par la sonde LRO le , d'une altitude de 50 km.
Site d'alunissage d'Apollo 17, photographié par la sonde LRO le , d'une altitude de 50 km. -
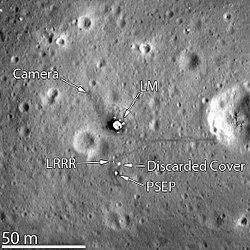 Image du site d'alunissage d'Apollo 11 prise par la sonde Lunar Reconnaissance Orbiter le .
Image du site d'alunissage d'Apollo 11 prise par la sonde Lunar Reconnaissance Orbiter le .



LRO permet de dresser trois cartes topographiques dont le niveau de détail est sans commune mesure avec les cartes existantes. Ces trois cartes définissent les contours des reliefs de la Lune, les pentes et enfin la rugosité de la surface. Les parties relatives à la face cachée de la Lune, méconnue, mettent clairement en évidence que notre satellite a subi un bombardement particulièrement violent reflété par la présence du cratère bassin Pôle Sud-Aitken qui constitue le plus grand cratère d'impact connu du Système solaire[29]. Les images prises par LRO d'escarpements relativement récents déjà observés à l'époque du programme Apollo semblent confirmer que la Lune continue à se contracter du fait du refroidissement de son cœur[30]. Le relevé topographique détaillé et systématique de la surface de la Lune effectué pour la première fois grâce à l'instrument LOLA met en évidence que la taille des astéroïdes qui ont frappé par le passé les planètes du Système solaire diminue de manière significative il y a environ 3,8 milliards d'années. Le radiomètre Diviner détecte par ailleurs une géologie beaucoup plus diversifiée que ce qui est connu avec des compositions de roches ne se limitant pas à l'opposition mers lunaires / hauts plateaux. Ces découvertes ouvrent la voie à une genèse géologique de la surface de la Lune beaucoup plus complexe que celle envisagée jusque-là[31].
-
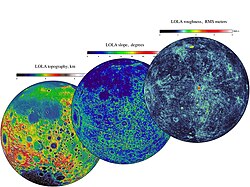 Les trois cartes topographiques de la Lune dressées à l'aide de l'altimètre LOLA.
Les trois cartes topographiques de la Lune dressées à l'aide de l'altimètre LOLA. -
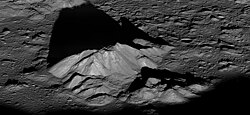 Le pic central du cratère Tycho photographié par LRO se dresse à 2 km au-dessus du plancher.
Le pic central du cratère Tycho photographié par LRO se dresse à 2 km au-dessus du plancher. -
 Détail du pic central du cratère Tycho. Le rocher fait 120 mètres de large.
Détail du pic central du cratère Tycho. Le rocher fait 120 mètres de large.



Notes et références[modifier | modifier le code]
- (en) « Planetary Protection », sur planetaryprotection.arc.nasa.gov (consulté le ).
- Donald Savage, Gretchen Cook-Anderson, « NASA Selects Investigations for Lunar Reconnaissance Orbiter », NASA News, (consulté le ).
- (en) Martin B. Houghton, Craig R. Tooley (NASA Goddard) et Richard S. Saylor, Jr (Honeywell), « Mission design and operations consideration for NASA'S Lunar Reconnaissance Orbiter » [PDF], , p. 3.
- (en) Mark Beckman (NASA Goddard), « Mission Design for the Lunar Reconnaissance Orbiter » [PDF], American Astronautical SOciety, 4-, p. 7-15.
- (en) « Press kit LRO LCROS » [PDF], NASA, p. 5 et p. 16.
- (en) Martin B. Houghton, Craig R. Tooley (NASA Goddard) et Richard S. Saylor, Jr (Honeywell), « Mission design and operations consideration for NASA'S Lunar Reconnaissance Orbiter » [PDF], , p. 5.
- (en) Martin B. Houghton, Craig R. Tooley (NASA Goddard) et Richard S. Saylor, Jr (Honeywell), « Mission design and operations consideration for NASA'S Lunar Reconnaissance Orbiter » [PDF], , p. 7.
- (en) Martin B. Houghton, Craig R. Tooley (NASA Goddard) et Richard S. Saylor, Jr (Honeywell), « Mission design and operations consideration for NASA'S Lunar Reconnaissance Orbiter » [PDF], , p. 6.
- (en) Martin B. Houghton, Craig R. Tooley (NASA Goddard) et Richard S. Saylor, Jr (Honeywell), « Mission design and operations consideration for NASA'S Lunar Reconnaissance Orbiter » [PDF], , p. 8.
- « Press kit LRO LCROS » [PDF], NASA, p. 7.
- (en) Neerav Shah,* Philip Calhoun*, Joseph Garrick,* Oscar Hsu,* and James Simpson, « Launch and commissioning of the Lunar Reconnaissance Orbiter » [PDF], , p. 5.
- « Press kit LRO LCROS » [PDF], NASA, p. 17-19.
- CRaTER: The Cosmic Ray Telescope for the Effects of Radiation Experiment on the Lunar Reconnaissance Orbiter Mission, H.E. Spence · A.W. Case · M.J. Golightly · T. Heine · B.A. Larsen · J.B. Blake P. Caranza ·W.R. Crain · J. George · M. Lalic · A. Lin · M.D. Looper · J.E. Mazur D. Salvaggio · J.C. Kasper · T.J. Stubbs · M. Doucette · P. Ford · R. Foster · R. Goeke ·D. Gordon · B. Klatt · J. O’Connor · M. Smith · T. Onsager · C. Zeitlin·L.W. Townsend · Y. Charara
- « CRaTER » (consulté le ).
- « http://www.moon.ucla.edu/ DLRE »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?).
- LAMP
- « LEND »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) (consulté le ).
- (en) « LOLA », sur lunar.gsfc.nasa.gov (consulté le ).
- LROC
- « Lunar Reconnaissance Orbiter Successfully Completes Critical Design Review » (consulté le ).
- (en) « Lunar Reconnaissance Orbiter / Science Mission Directorate », sur science.nasa.gov (consulté le ).
- (en) « LRO Instrument Status Update - 01.11.11 », sur NASA (consulté le ).
- Gilles Dawidowicz, « Premières images de LRO », L'Astronomie, no 19, , p. 11 (ISSN 0004-6302).
- « A Whole New Way of Seeing the Moon » (consulté le ).
- (en) « LRO Gets Additional View of Apollo 11 Landing Site », sur NASA LRO, .
- (en) « UCSD Physicists Signal Long Lost Soviet Reflector on Moon », sur NASA Lunar Science Institute, .
- (en) « UCSD Physicists Signal Long Lost Soviet Reflector on Moon », sur LRO Supports Historic Lunar Impact Mission, .
- (en) G. Randall Gladstone, Kurt D. Retherford et al., « Far‐ultraviolet reflectance properties of the Moon's permanently shadowed regions », Journal of Geophysical Research: Planets, vol. 117,, no E12, , p. 1475-1476 (DOI 10.1029/2011JE003913, lire en ligne)
- (en) « The Lunar Far Side as Seen by the Lunar Orbiter Laser Altimeter », sur NASA, .
- (en) « NASA's LRO Reveals 'Incredible Shrinking Moon », sur NASA, .
- (en) « NASA's LRO Exposes Moon's Complex, Turbulent Youth », sur NASA, .
Documents de référence[modifier | modifier le code]
- NASA
- (en) « Press kit : Lunar Reconnaissance Orbiter (LRO) : Leading NASA’s Way Back to the Moon - Lunar Crater Observation and Sensing Satellite (LCROSS) : NASA’s Mission to Search for Water on the Moon », Dossier de présentation à la presse des missions LRO et LCROSS [PDF], NASA, juin 2009, (consulté le ).
Annexes[modifier | modifier le code]
Articles connexes[modifier | modifier le code]
- Programme Lunar Precursor Robotic.
- Lunar Crater Observation and Sensing Satellite.
- Lunar Atmosphere and Dust Environment Explorer.
- Exploration de la Lune.
- Mars Reconnaissance Orbiter.
Liens externes[modifier | modifier le code]
- (en) Site officiel Lunar Reconnaissance Orbiter Camera.
- (en) LRO sur le site de la NASA.
- (en) Présentation du déroulement de la mission (Craig Tooley 2006).
