L’amarrage, dans le domaine de l’astronautique, est l’opération réalisée dans l’espace et destinée à rendre solidaires des engins spatiaux[Note 1]. L'amarrage est d'abord mécanique c'est-à-dire qu'il solidarise les deux engins spatiaux. Il est généralement suivi d'un amarrage électrique et éventuellement fluidique qui assure la continuité des circuits électriques (énergie, signaux) et, dans le cas où un des engins ravitaille l'autre, le transfert de fluides (ergols, eau, oxygène, etc.).
Le tout premier amarrage dans l'espace a été réalisé le , par Neil Armstrong (mission Gemini 8). De 1969 à 1972, des opérations de rendez-vous et d'amarrage ont été réalisées en orbite lunaire dans le cadre du programme Apollo. Depuis les années 1970, Américains et Russes amarrent régulièrement leurs vaisseaux aux stations orbitales, imités par les Chinois à partir des années 2010.
Des mécanismes d'amarrage de plus en plus sophistiqués ont été définis mais aucune norme ne s'est imposée. Les principaux paramètres sont les dimensions de l'écoutille, la masse, le caractère hybride ou non du dispositif, le mécanisme d'amarrage. La manœuvre d'amarrage peut être réalisée soit manuellement (guidé par l'équipage) soit de manière automatique (sans intervention humaine).
La phase d'amarrage est précédée d'une longue phase d'approche décomposée en plusieurs étapes destinée à ajuster la vitesse, l'orientation et la position relatives des deux engins spatiaux. Par ailleurs dans l'espace, les opérations d'accouplement mécanique pour différentes raisons (en particulier l'absence de gravité) sont difficiles.
Selon Robert L. Gibson, commandant de la navette spatiale Atlantis durant la première mission du programme Shuttle-Mir, l'opération d'amarrage présente la difficulté combinée d'un ravitaillement en carburant entre deux avions en vol et de l'atterrissage d'un avion sur un porte-avions. La marge d'erreur est particulièrement faible et s'il se produit une défaillance d'équipement combinée avec une mauvaise réaction humaine, les conséquences peuvent être particulièrement graves. L'amarrage de deux engins spatiaux en l'absence de pesanteur est en effet un problème physique complexe. Sur Terre, le mouvement de deux mobiles est en grande partie limité que ce soit au sol, en mer ou même en vol (avion). Dans l'espace, il est nécessaire de contrôler simultanément 8 degrés de liberté pour que l’amarrage puisse se faire sans dépasser la résistance mécanique du système d'amarrage. Par ailleurs, sur Terre, la friction du sol ou la résistance de l'air ou de l'eau constituent des forces qui amortissent les mouvements. Dans l'espace, toute l'énergie produite par l'amarrage doit être absorbée et dissipée par les vaisseaux eux-mêmes[1].
L'opération d’amarrage est généralement la suite d'un rendez-vous spatial réussi. Au cours de cette dernière manœuvre, le vaisseau spatial « chasseur » a progressivement modifié son orbite de manière à se retrouver sur la même orbite et à faible distance du vaisseau auquel il veut s'amarrer. Les opérations d'amarrage proprement dites débutent lorsque les deux vaisseaux ne sont plus éloignés que de quelques centaines de mètres. Le chasseur doit s'approcher à vitesse de plus en plus réduite du port d'amarrage de l'autre vaisseau de manière en bout de course à avoir parfaitement aligné l'axe des deux ports d'amarrage, annulé les composantes de vitesse de rotation dans les deux axes situés dans le plan du port d'amarrage, et annulé les vitesses de translation dans ces deux axes également.
Les principaux systèmes d'amarrage entre vaisseaux sont :
Système d'amarrage sonde-cône des deux modules d'Apollo : le CM, en bas, et le LM, en haut.
Le Système d'amarrage sonde-cône est mis en œuvre par les vaisseaux spatiaux russes Soyouz et les stations spatiales Saliout, Mir ainsi que par le segment russe de la Station spatiale internationale. Une variante a été également mise en œuvre par les vaisseaux américains du programme Apollo mais les deux systèmes ne sont pas compatibles entre eux. Le dispositif comprend une sonde extensible portée par le vaisseau qui effectue la manœuvre d'amarrage et un cône porté par le véhicule passif. Les pièces d’amarrage sont donc différentes (système mâle/femelle). Système d'amarrage APAS, unissant Apollo et Soyouz.Chaque pièce est située à l'extérieur du vaisseau au bout d'un tunnel fermé par une écoutille qui doit former la paroi et assurer l'étanchéité du passage ménagé entre les deux vaisseaux et au centre de l'anneau d'amarrage qui supporte les efforts mécaniques. Le véhicule actif doit manœuvrer de manière à emboîter la sonde dans le cône : celui-ci par sa forme assure le guidage final et amortit le mouvement du vaisseau manœuvrant jusqu'à son immobilisation. Lorsque la sonde est correctement engagée, des verrous s'enclenchent autour de la tête pour solidariser les vaisseaux puis la sonde est rétractée pour mettre en contact les anneaux d'amarrage qui créent un tunnel étanche après s'être verrouillés l'un à l'autre. Au cours du rapprochement, des dispositifs mécaniques corrigent les défauts d'alignement résiduels des deux vaisseaux. Après s'être assuré de l'étanchéité de la liaison par des moyens divers, les équipages des vaisseaux ouvrent les écoutilles de part et d'autre et retirent éventuellement une partie du dispositif sonde-cône pour libérer le tunnel et permettre la circulation entre les vaisseaux.
Système d'amarrage CBM, utilisé pour assurer la liaison entre les modules de l'ISS. On peut apprécier la taille de l'écoutille.
L'APAS développé pour le programme Apollo-Soyouz (1975) est ensuite utilisé par la navette spatiale américaine pour s'amarrer à la station Mir (1995) puis à la station spatiale internationale (1998). L'idée qui a présidé à sa conception était que tout système d'amarrage APAS puisse s'amarrer à un autre système APAS, les deux étant androgynes contrairement au système précédent. Au moment de l'amarrage, il y a obligatoirement un côté qui joue un rôle actif et l'autre un rôle passif, mais les deux côtés ont la possibilité d'être soit actif soit passif[2].
Le CBM est utilisé à partir de [3] pour assurer la liaison entre les segments de la partie non russe de la station spatiale internationale. Il est également présent sur certains vaisseaux qui ravitaillement de la station, tels l'HTV, le Cygnus et le SpaceX Dragon. Il se caractérise par la grande taille du tunnel (la surface de la section est la triple de celle des systèmes précédents) qui constitue une nécessité pour amener les équipements les plus encombrants à l'intérieur de la station.
Il faut également mentionner les dispositifs utilisés pour les amarrages ne nécessitant pas de transferts d'équipages, donc de systèmes de pressurisation. Ainsi, par exemple, au cours de la mission STS-125 (2009) de la navette spatiale américaine, le télescope spatial Hubble a été pourvu du système « Soft-Capture Mechanism » (SCM).
Les techniques de rendez-vous et d'amarrage entre deux vaisseaux spatiaux sont mises au point quelques années après le début de l'ère spatiale (1957) dans le cadre de la course à l'espace entre les Américains et les Soviétiques. Cette compétition a été officiellement déclarée le par le président des États-Unis John Kennedy, après que les Soviétiques aient envoyé le premier satellite artificiel (Spoutnik 1, ) et le premier homme dans l'espace (Gagarine, ). Le défi lancé par Kennedy n'était rien d'autre que d'envoyer un homme sur la Lune avant la fin de la décennie. Ce programme ambitieux nécessitait du matériel important et des procédures complexes, en particulier l'assemblage de deux modules distincts : le module de commande, à bord duquel résidaient trois membres d'équipage, et le module lunaire, à bord duquel, parvenus en orbite lunaire, deux d'entre eux s'installaient, atterrissaient, effectuaient leur séjour et, revenus en orbite, s'amarraient au vaisseau-mère, à bord duquel ils revenaient sur Terre. Baptisé "Apollo", ce programme ne pouvait être mené d'emblée : il nécessitait un certain nombre d'essais préalables, menés durant la période 1965-1966 lors du programme Gemini.
Le , une fusée Agena doit servir de cible au vaisseau Gemini 6, habité par deux hommes et devant être lancé peu après elle. Mais cette fusée explose six minutes après son décollage et la mission est reportée. Finalement, deux mois plus tard, Gemini 6 décolle et son équipage (Schirra-Stafford) réalise le tout premier rendez-vous spatial de l'histoire, en s'approchant à quelques centimètres du vaisseau Gemini 7 (occupé par Borman et Lovell) mais sans toutefois s'amarrer à lui, les deux engins n'étant pas équipés de pièces ad hoc.
Trois ans avant de devenir célèbre en marchant pour la première fois sur la Lune, Neil Armstrong réalise le premier amarrage dans l'espace.Le premier amarrage spatial : Gemini 8 et Agena 8, en 1966.
En définitive, le premier amarrage est effectué le par Neil Armstrong, commandant de la mission Gemini 8, entre son vaisseau spatial et la fusée-cible Agena 8. Mais à la suite d'un incident technique, l'astronaute doit désamarrer les deux engins et rentrer d'urgence sur Terre. D'autres amarrages sont effectués avec succès entre juillet et (vols Gemini 10 à 12).
Le premier amarrage automatique est effectué le par les vaisseaux soviétiques Cosmos 186 et Cosmos 188 et le s'opére une jonction entre les vaisseaux habités Soyouz 4 et Soyouz 5. À cette occasion, deux cosmonautes de Soyouz 5 effectuent une sortie extravéhiculaire pour rejoindre Soyouz 4 et revenir sur Terre à son bord car il n'y a pas de tunnel de communication dans les colliers d'amarrage. Cette mission s'inscrit dans le cadre des préparatifs d'un programme de débarquement sur la Lune, un programme mené dans le plus total secret et qui ne sera révélé que des années plus tard. Il était envisagé qu'un cosmonaute marcherait sur la Lune avant les Américains, occupant seul un module lunaire, puis qu'il rejoindrait un collègue resté en orbite après une sortie extravéhiculaire, aucun tunnel de liaison n'étant conçu au centre des pièces d'amarrage[4].
Le programme soviétique est donc à la fois moins ambitieux et plus risqué que celui des Américains qui, eux, ont prévu un tunnel de liaison entre le module lunaire (LM) et le module de commande (CM), Ce qui signifie que les moonwalkers n'ont à effectuer de sortie dans l'espace qu'en cas d'incident empêchant la jonction, procédure testée en orbite terrestre en mars 1969 lors de la mission Apollo 9.
Les différents composants du système d'amarrage Apollo.
En définitive, le programme soviétique sera ponctué d'échecs et aucun Soviétique n'approchera la Lune tandis qu'au contraire les Américains mèneront le leur avec succès. De à se déroulent huit missions emportant l'ensemble du train spatial. Les équipages procèdent à différents amarrages entre leurs modules. Tout d'abord au début des missions, quand le train spatial s'éloigne de la Terre et qu'il s'agit de retirer le module lunaire, logé au sommet du troisième étage de la fusée porteuse ; puis en orbite lunaire, après les séjours effectués sur la Lune et avant le retour sur Terre. À l'exception du début de la mission Apollo 14, en 1971, où le pilote Stuart Roosa éprouve des difficultés à amarrer le module de commande au module lunaire (lire), le système d'amarrage fonctionne parfaitement.
Au début des années 1970, s'engage une nouvelle compétition, celle des stations spatiales. Russes et Américains amarrent leurs vaisseaux (Soyouz et Apollo) à leurs stations spatiales respectives (Saliout, en 1971, et Skylab, en 1973). Comme ils en ont l'habitude, ils utilisent le système d'amarrage sonde-cône : le vaisseau habité est équipé d'un élément mâle (sonde) et le véhicule-cible d'un élément femelle (cône).
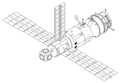
Schéma du premier système d'amarrage périphérique dit "androgyne", l'APAS-75.
En 1972, quand les Américains ont gagné la course à la Lune, une collaboration est décidée avec les Soviétiques et un vol commun est programmé. Le , dans le cadre du vol Apollo-Soyouz, se déroule le premier amarrage entre un vaisseau américain (commandé par Thomas Stafford) et un vaisseau russe (commandé par Alexei Leonov). Les atmosphères des deux engins étant différentes, un module spécial a été construit pour faire fonction de sas, logé dans la soute de la fusée porteuse américaine. Par ailleurs le système sonde-cône étant connoté sexuellement et afin de ménager certaines susceptibilités, les deux vaisseaux ont été pourvus de pièces « hermaphrodites », le système APAS.
Sans réelle portée scientifique, l'événement est avant tout de nature politique : il met officiellement fin à près de vingt ans de compétition spatiale entre les deux pays. Pour autant, jusqu'à la fin de la Guerre froide, au début des années 1990, il restera sans lendemain : les deux nations vont continuer de mener séparément leurs programmes spatiaux.
Le est lancée la station soviétique Saliout 6, premier engin disposant de deux ports d'amarrage, un à chaque extrémité. Le , Soyouz 27, lancé la veille, s'amarre à la station, à laquelle Soyouz 26 est fixé depuis un mois. Pour la première fois, trois vaisseaux différents sont assemblés en orbite. Le , soit six jours après le retour sur Terre de Soyouz 26, et à sa place, vient s'amarrer le vaisseau de ravitaillement Progress 1, de façon totalement automatique.
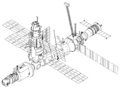
Le est lancée la station Mir. Elle ouvre une nouvelle voie dans l'histoire de l'astronautique car elle est équipée de six pièces d'amarrage : cinq disposées à l'une de ses extrémités, disposées autour d'un élément servant de nœud ; la dernière à l'autre extrémité. La station est assemblée d' (apport du module Kvant-1) à (apport du module Priroda), atteignant finalement une masse de 124 tonnes et permettant une occupation ininterrompue pendant douze ans et demi, jusqu'en 2001. Entretemps, les Américains se seront associés à son exploitation, huit astronautes y séjournant pour des vols longue durée, de à .
En , soit moins d'un an après l'écroulement de l'Union soviétique, la coopération entre Russes et Américains reprend aux termes d'un accord signé entre le président des États-Unis George Bush et le président russe Boris Eltsine.
Le survient le premier accident grave consécutif à une procédure d'amarrage : le vaisseau automatique Progress-M 34 entre en collision avec le module Spektr, de la station Mir, endommageant ses panneaux solaires et perforant sa coque. Celui-ci se dépressurisant, l'équipage (comptant l'Anglo-américain Michael Foale) est contraint de l'isoler du reste de la station.
En 1998 la coopération russo-américaine prend un nouveau tournant avec la création progressive de la Station spatiale internationale, projet américain auquel a été associé les russes pour faire face à la tourmente économique politique que traverse ce pays. Le , l'équipage de la navette Endeavour (mission STS-88) procède à l'amarrage du module Unity au module russe Zarya, lancé dix jours plus tôt. Durant les années qui suivent, une multitude de navettes américaines et de Soyouz russes effectuent de multiples amarrages avec l'ISS : tout d'abord durant la phase de sa construction (laquelle n'est qu'une succession d'amarrages de modules) puis durant toute sa phase d'exploitation. À partir de ce moment, plusieurs engins automatiques de ravitaillement des équipages s'amarrent également à la station ; notamment les vaisseaux russes Progress et les vaisseaux européens ATV.
Pour assembler les modules non Russes, les Américains ont conçu un nouveau système d'amarrage, le "Common Berthing Mechanism" (CBM), qui permet d'installer entre les modules des écoutilles (en forme de carrés aux angles arrondis) de 1,27 m de côté, permettant par conséquent de faire circuler dans la station des racks particulièrement volumineux. Le module Unity, élément central de la station, est ainsi équipé de cinq ports CBM : quatre sur ses côtés, le dernier à son extrémité.
Un vaisseau automatique Dragon saisi par le bras télémanipulateur de l'ISS, le Canadarm2.
Au fil de son exploitation, de nouvelles procédures d'amarrage sont expérimentées. Notamment, dans les derniers instants qui précèdent la jonction d'un vaisseau automatique, l'utilisation d'un bras télémanipulateur, le Canadarm2, à la place des traditionnelles rétro-fusées, pour éviter que ne se reproduise l'accident de Progress-M 34 sur la station Mir en 1997.
La station spatiale internationale constitue de très loin le plus grand des satellites artificiels. Mesurant approximativement 110 m de longueur, 74 m de largeur et 30 m de hauteur, elle comporte 13 modules pressurisés et sa masse est d'environ 400 tonnes. Cette performance a été rendue possible grâce à la succession des amarrages des différents modules au fil des années. Mais, pour cette raison même, elle n'est pas sans susciter quelques inquiétudes. En 2018, la NASA a exprimé le souhait de se désengager du programme après 2024[5]. La station pourrait alors être privatisée ou désorbitée. À partir du moment où il aura été décidé de l'abandonner, il sera nécessaire de réaliser son démantèlement par désamarrages multiples de sorte que les débris parvenant au sol soient de taille limitée et tombent dans des zones inhabitées. Ce qui nécessitera une importante logistique.
En 2003, la Chine devient la troisième nation à envoyer un homme dans l'espace par ses propres moyens. En quinze ans (2003-2018), elle n'envoie que six vaisseaux habités (programme Shenzhou) mais à chaque vol, elle démontre qu'elle récupère son retard sur la Russie et les États-Unis. En 2011, elle expédie sa première station spatiale, Tiangong 1, et peu après, le vaisseau inhabité Shenzhou 8 vient s'y amarrer. Deux équipages l'occupent en 2012 et 2013.
Une seconde station, Tiangong 2, est lancée en 2016, rejointe successivement par un équipage (mission Shenzhou 11) puis par un cargo ravitailleur, Tianzhou. La Chine démontre ainsi qu'elle maîtrise les techniques d'amarrage, tant manuelles qu'automatiques.
↑Le terme correspondant en anglais est hard docking. Il ne doit pas être confondu avec l'arrimage (stowage) qui est l'opération consistant à fixer une charge utile à un véhicule spatial. L’antonyme d’amarrage est le désamarrage.
(en) Christopher Michael Jewison et David W.Miller, Guidance and Control for Multi-stage Rendezvous and Docking Operations in the Presence of Uncert, , 269 p. (lire en ligne) — Thèse sur les opérations de rendez-vous orbital et d'amarrage
(en) M.E. Polites, An Assessment of the Technology of Automated Rendezvous and Capture in Space, NASA, , 62 p. (lire en ligne)
Droit français : arrêté du relatif à la terminologie des sciences et techniques spatiales.












 :
: :
: :
: :
: :
: :
: :
: :
:








.jpg)


