
Spirit (rover)
Pour les articles homonymes, voir Spirit.

| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Mars Exploration Rover |
| Domaine | Géologie de Mars |
| Type de mission | Astromobile |
| Statut | Mission achevée |
| Lancement | |
| Lanceur | Delta II Heavy |
| Fin de mission | |
| Durée | 6 ans et 3 mois |
| Durée de vie | 90 jours (mission primaire) |
| Identifiant COSPAR | 2003-027A |
| Distance parcourue | 7,73 km |
|---|
| Masse au lancement | 185 kg |
|---|---|
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 200 W |
| Atterrissage |
|---|
| PanCam | Caméra panoramique |
|---|---|
| NavCam | Caméras de navigation (x 2) |
| Infrarouge | Spectromètre |
| Mössbauer | Spectromètre |
| APXR | Spectromètre |
| ? | Caméra microscope |
| HGA | Antenne grand gain |
| LGA | Antenne faible gain omnidirectionnelle |
| UHF | Antenne omnidirectionnelle |
Spirit (« Esprit » en anglais), alias MER-A (Mars Exploration Rover - A), est l'un des deux astromobiles de la mission Mars Exploration Rover de l'agence spatiale américaine, la NASA, lancé vers la planète Mars en 2003. L'engin qui s'est posé sur Mars le 4 janvier 2004 dans le cratère Goussev avait pour but d'étudier la géologie de Mars et de déterminer en particulier le rôle joué par l'eau dans l'histoire de la planète. Sa mission qui devait durer 90 jours s'est achevée officiellement en mars 2010. Cette durée de vie lui a permis de parcourir 7,73 km (objectif de la mission primaire 600 mètres) et de largement dépasser les objectifs scientifiques assignés.
Spirit pèse environ 185 kg et se déplace sur six roues mues par l'énergie électrique fournie par des panneaux solaires. Il est équipé de trois paires de caméras utilisées pour la navigation et de plusieurs instruments scientifiques : une caméra panoramique située sur un mât à 1,5 mètre de hauteur, un outil pour abraser la surface des roches porté par un bras articulé sur lequel se trouvent également un spectromètre à rayons X, un spectromètre Mössbauer et une caméra microscope. Enfin, un spectromètre infrarouge est utilisé pour l'analyse des roches et de l'atmosphère. Ses déplacements sont pilotés par le Jet Propulsion Laboratory (JPL), une division du California Institute of Technology situé à Pasadena en Californie, lequel gère l'ensemble du programme Mars Exploration Rover pour la NASA.
Spirit a pour objectif principal l'étude géologique de la surface de Mars d'une région jugée susceptible d'avoir été autrefois irriguée, en l'occurrence le cratère Gusev, supposé avoir abrité un ancien lac. Le rover a été conçu pour une durée de vie de 90 jours martiens (sols) et pour parcourir 600 mètres. Plus de cinq ans après, le 17 mars 2009, il avait parcouru près de 7,7 kilomètres. Il s'est enlisé dans une dune fin 2009 et sa dernière communication avec la Terre date du 22 mars 2010.
Historique du projet
[modifier | modifier le code]Objectifs de la mission
[modifier | modifier le code]Sept objectifs scientifiques ont été assignés à la mission Mars Exploration Rover[1]. Ce sont tous des missions géologiques concernant le passé de la planète. En particulier, les rovers doivent étudier des traces de la présence passée d'eau sur Mars. De plus, cette étude au sol sera comparée à celles effectuées depuis l'orbite par les différentes sondes spatiales telles que Mars Reconnaissance Orbiter.
Au cours des deux prochaines décennies, la NASA continuera à mener des missions consacrées à la recherche d'une éventuelle vie sur Mars, se demandant si la vie n'a jamais pris naissance sur la planète Mars. La recherche a commencé à déterminer si l'environnement martien n'a jamais été propice à la vie. La vie, comme nous l'entendons, nécessite de l'eau, aussi l'histoire de l'eau sur Mars est essentielle pour savoir si l'environnement martien n'a jamais été propice à la vie. Bien que les Mars Exploration Rovers n'ont pas la capacité de détecter directement la vie, ils ont offert des informations très importantes sur l'habitabilité de l'environnement au cours de l'histoire de la planète.
Caractéristiques techniques de l'astromobile
[modifier | modifier le code]


Spirit (et son jumeau, Opportunity) sont des robots à six roues, alimentés par énergie solaire, mesurant 1,5 m de hauteur, 2,3 m de largeur et 1,6 m de long et pesant 180 kg. Le rover est équipé d'un système de suspension, baptisée rocker-bogie, permettant une mobilité sur terrain accidenté. Chaque roue possède son propre moteur. Le véhicule est dirigé à l'avant et à l'arrière et est conçu pour fonctionner en toute sécurité à des inclinaisons de 30 degrés. La vitesse maximale est de 50 millimètres par seconde[3], soit 0,18 kilomètre par heure, bien que la vitesse moyenne soit d'environ 10 millimètres par seconde. Spirit et Opportunity ont des morceaux de métal provenant du World Trade Center qui ont été « transformés en boucliers pour protéger les câbles sur les mécanismes de forage »[4],[5].
Des panneaux solaires génèrent environ 140 watts pour un maximum de quatre heures par jour martien (sol), tandis que des batteries lithium-ion rechargeables stockent l'énergie pour une utilisation nocturne. L'ordinateur de bord de Spirit utilise un processeur RAD6000, cadencé à 20 mégahertz avec 128 mégaoctets de DRAM, 3 mégaoctets de mémoire EEPROM et 256 mégaoctets de mémoire flash. La température de fonctionnement du rover s'étend de -40 à +40 degrés Celsius et des unités de chauffage à radioisotopes fournissent un niveau de chauffage de base, assistées par des radiateurs électriques lorsque cela est nécessaire. Un film d'or et un aérogel de silice fournissent une isolation.
Les communications dépendent d'une antenne de communication omnidirectionnelle à faible gain, à débit de données faible et d'une antenne à gain élevé orientable, toutes les deux étant en contact direct avec la Terre. Une antenne à faible gain est également utilisée pour relayer les données à un satellite en orbite martienne.
Spirit embarque plusieurs instruments scientifiques fixes :
- une caméra panoramique (Pancam, Panoramic Camera) : examine la texture, la couleur, la minéralogie, et la structure du terrain local.
- une caméra de navigation (Navcam, Navigation Camera) : monochrome avec un plus grand champ de vision, mais une résolution inférieure, pour la navigation et la conduite.
- un spectromètre infrarouge miniature d'émission thermique (Mini-TES, Miniature Thermal Emission Spectrometer) : identifie les roches et les sols prometteurs pour un examen plus approfondi, et détermine les processus qui les ont formés.
Les autres instruments fixés sur un bras mobile sont :
- le spectromètre Mössbauer (MB) MIMOS II : utilisé pour les examens rapprochés de la minéralogie des roches de fer et des sols.
- le spectromètre Alpha Particle Rayons X (APXS) : utilisé pour les analyses rapprochées de l'abondance des éléments qui composent les roches et les sols.
- la caméra microscope (MI, Microscopic Imager) : obtient des images en gros plans à haute résolution de roches et des sols.
- la brisse RAT (Rock Abrasion Tool) : expose la matière fraîche pour examen par les autres instruments.
- des aimants pour la collecte des particules de poussière magnétiques.
Transit entre la Terre et Mars
[modifier | modifier le code]
Le rover est lancé le [6] par une fusée Delta II 7925 9.5[6],[7] et atterrit le 4 janvier 2004 à 4 h 35 GMT (MSD 46216 3:35 AMT, 26 Tula 209 Darien)[réf. nécessaire] dans le cratère Gusev, situé 15 degrés au sud de l’équateur. Le cratère, baptisé ainsi en 1976 du nom d'un astronome russe du XIXe siècle, Matveï Goussev, mesure environ 145 kilomètres de diamètre et a été creusé par l'impact d'une grande météorite il y a plusieurs milliards d’années.
Déroulement de la mission sur le sol martien
[modifier | modifier le code]

Le rover a achevé sa mission principale de 90 sols. Aidé par des événements de nettoyage, provoqués par des mécanismes encore mal compris, qui ont dépoussiéré ses panneaux solaires, augmentant la puissance disponible, Spirit a continué de fonctionner efficacement plus de vingt fois plus longtemps que prévu par les planificateurs de la NASA, après l'achèvement de la mission principale. Spirit a aussi parcouru 7,73 kilomètres, au lieu des 600 mètres planifiés[8], permettant une analyse géologique plus approfondie des roches martiennes et des caractéristiques de la surface martienne. Les premiers résultats scientifiques de la première phase de la mission (la mission primaire de 90 sols) ont été publiés dans un numéro spécial de la revue Science[9].
Le 1er mai 2009 (5 ans, 3 mois et 27 jours terrestres après l'atterrissage, soit 21,6 fois la durée initialement prévue de la mission), Spirit s'est enlisé dans le sol mou[10]. Ce n'était pas le premier des enlisements de la mission et pendant les huit mois suivant, la NASA a soigneusement analysé la situation. Sur Terre, un modèle du rover placé sur une reproduction du sol martien a été utilisé pour simuler les manœuvres de dégagement. Une programmation du rover pour se libérer est effectuée mais toutes les tentatives se soldent par un échec.
Ces efforts se sont poursuivis jusqu'au 26 janvier 2010, lorsque les responsables de la NASA ont annoncé que le rover est probablement irrémédiablement bloqué à son emplacement dans le sol mou[11], mais qu'il continuera à mener des recherches scientifiques à partir de son emplacement actuel[12].
Le rover a continué son rôle de plate-forme scientifique stationnaire jusqu'à ce que la communication s'arrête le sol 2210 (22 mars 2010)[13],[14]. Le JPL a continué à tenter de retrouver le contact jusqu'au 24 mai 2011, lorsque la NASA a annoncé que les efforts visant à rétablir la communication avec le rover, resté muet, avaient pris fin[15],[16],[17]. Un adieu officiel a été prévu au siège de la NASA après le Memorial Day et a été diffusé sur NASA TV.
La mission primaire de Spirit était planifiée pour durer au moins 90 sols. La mission a reçu plusieurs extensions et a duré environ 2 208 sols. Le 11 août 2007, Spirit a atteint la deuxième plus longue durée de fonctionnement sur la surface de Mars pour un atterrisseur ou rover avec 1 282 sols, un sol de plus que l'atterrisseur Viking 2. Cependant, Viking 2 était alimenté par une pile nucléaire alors que Spirit était alimenté par des panneaux solaires. Jusqu'à Opportunity, qui l'a dépassé le 19 mai 2010, la sonde martienne ayant fonctionné le plus longtemps à la surface de Mars était Viking 1, qui a fonctionné 2 245 sols. Le 22 mars 2010, Spirit a envoyé sa dernière communication, à un peu moins d'un mois du record de Viking 1. Une archive des mises à jour hebdomadaires sur l'état du rover est disponible au Spirit Update Archive[18].
La distance totale parcourue par Spirit, mesurée par odométrie, au 22 mars 2010 (sol 2210) est 7 730,50 mètres[19].
Chronologie de la mission
[modifier | modifier le code]2004
[modifier | modifier le code]Le 4 janvier, Spirit se pose à seulement 10 kilomètres du centre de la zone elliptique prévue[20],[21]. Peu après, il envoie ses premières photos.
Le 13 janvier (sol 9) est envoyé le premier panorama à partir de 225 clichés pris séparément par la PanCam[22] de Spirit puis rassemblés numériquement[23]. Celles-ci donnent aux scientifiques les informations dont ils ont besoin pour sélectionner les cibles géologiques prioritaires.
L'image panoramique ci-dessous montre une surface légèrement ondulée, parsemée de petits rochers, avec des collines à l'horizon, à 27 kilomètres[24]. Le site d'atterrissage est baptisé « Columbia Memorial Station » en l'honneur des sept astronautes tués un an plus tôt dans l'accident de la navette spatiale Columbia.


Sleepy Hollow est un cratère de 9 mètres de diamètre, situé à environ 12 mètres au nord de l'atterrisseur[25]. On l'aperçoit sur le côté droit de l'image ci-dessus. Cette cible a été choisie juste avant que le rover ne quitte le socle de l'atterrisseur.
Le 21 janvier (sol 18), à la suite d'un dysfonctionnement de son ordinateur central, Spirit cesse momentanément de communiquer avec la Terre. Après avoir localisé le problème, les ingénieurs suppriment certains fichiers et reformatent tout le système de mémoire. Le 6 février (sol 33), le rover est restauré et les activités scientifiques reprennent [26].

Dès le lendemain, l'instrument RAT effectue la première abrasion intentionnelle d'un rocher sur Mars, en creusant une dépression ronde de 45,5 millimètres de diamètre et atteignant 2,65 millimètres de profondeur sur un rocher appelé Adirondack[27]. Ce trou expose le matériau intérieur de la roche, frais, pour une inspection fine avec l'imageur microscopique du rover et deux spectromètres, sur le bras robotisé. Cette image a été prise par la caméra panoramique de Spirit, qui fournissait un contrôle visuel rapide de la réussite de l'abrasion.

Cette image couleur prise par la caméra panoramique de Spirit le 13 février (sol 40) est centrée sur une roche feuilletée baptisée Mimi. Elle est très différente de toutes les roches jusqu'alors observées. Son apparence floconneuse conduit les scientifiques à émettre un certain nombre d'hypothèses. Elle aurait pu être soumise à une pression par enfouissement, par impact, ou peut-être par une dune qui a été cimentée dans des couches feuilletées, un processus qui implique parfois l'action de l'eau.
Le 5 mars (sol 60), la NASA annonce que Spirit a trouvé des indices de l'histoire de l'eau sur Mars dans un rocher surnommé Humphrey. Raymond Arvidson, professeur au McDonnell Center for Space Sciences et président du Earth and Planetary Sciences à l'Université Washington à Saint-Louis, déclare : « Si nous avions trouvé ce rocher sur Terre, nous dirions que c'est une roche volcanique qui a un peu de fluide se déplaçant à travers celui-ci. »

Le cratère Bonneville
[modifier | modifier le code]Le 11 mars (sol 66), Spirit atteint le cratère Bonneville, situé à 370 mètres au nord de son point d'atterrissage, large d'environ 200 mètres et profond d'environ 10 mètres[28]. Ne trouvant rien d'intéressant à l'intérieur, Spirit longe le bord sud puis est orienté vers le sud, avec pour objectif d'atteindre les Columbia Hills[29], situées à 2,3 kilomètres de là.
Le 1er avril (sol 87), le rover s'éloigne de Bonneville et est dirigé vers l'est. La mise à jour du logiciel de bord lui permet d’augmenter sensiblement sa vitesse.

.jpg)
Le 19 avril (sol 105), Spirit atteint le cratère Missoula, large de 91 mètres et profond[pas clair]. Ce cratère n'étant pas considéré comme une cible prioritaire, le rover le contourne (par le nord) et poursuit sa route. De même, au sol 118, il observe le cratère Lahontan mais s'en éloigne sans tarder car les dunes qui l'environnent présentent un risque d'enlisement.

Les Columbia Hills
[modifier | modifier le code]Le 10 juin (sol 156), Spirit atteint enfin la base des Columbia Hills, à un endroit baptisé West Spur. Le Creux de Hank est étudié pendant trois semaines, jusqu'au sol 181. Dans ce cratère est présente une roche inhabituelle surnommée Pot of Gold.
De là, après une petite boucle par le nord, vers la cible Wooly Patch, qui est étudiée du 18 au 25 juillet (sols 192-199), Spirit s'engage dans les collines. Le 29 juillet (sol 203), il étudie la roche Clovis. celle-ci est broyée pour être analysée du 5 au 20 août (sol 210-225). Vient ensuite Ebenezer (sols 226-235).
Entre le 3 et le 28 septembre (sols 239-262), la communication avec Spirit est rompue en raison d'une conjonction solaire. Lorsqu'elle reprend sont analysés les rochers Tetl (sol 270), Uchben et Palinque (sols 281-295) puis Lutefisk (sols 296-303). Au sol 344, Spirit amorce son ascension de la colline Husband, via Cumberland Ridge, Larry Lookout et Tennessee Valley.

2005
[modifier | modifier le code]Le 26 janvier (sol 373), alors qu'il approche le sommet de la crête Cumberland, Spirit effectue un carottage de plus d'un centimètre dans une roche baptisée Peace grâce à son instrument d'abrasion de roches RAT. C'est le trou le plus profond jamais creusé jusqu'alors sur Mars.
Le mois de février est marqué par la poursuite de l'escalade des Columbia Hills le long de la crête rocheuse Cumberland. Le logiciel de bord du rover est mis à jour, ce qui facilite son autonomie. Comme le terrain est pentu (11 degrés), il est obligé de faire des lacets. Au fur et à mesure qu'il gravit les collines, Spirit retransmet des images du paysage du cratère Gusev, dont les remparts apparaissent à l'horizon.
Au début du mois de mars, le rover parvient à un endroit baptisé Larry's Lookout Le panorama y est exceptionnel : la Tennessee Valley, en contrebas, est bien visible, ainsi que d'autres collines et les remparts du cratère Gusev.
Durant sa progression, Spirit étudie différentes curiosités géologiques, dont Paso Robles, qui contient la plus grande quantité de sel trouvée sur la planète rouge. Le sol contient aussi une grande quantité de phosphore dans sa composition, mais pas presque aussi élevé qu'une autre roche prélevée par Spirit, Wishstone. À propos de la découverte, Steve Squyres affirme : « Nous essayons toujours de travailler sur ce que cela signifie, mais de toute évidence, avec beaucoup de ce sel autour, l'eau a œuvré »[30].
-
 Roche Pot of Gold.
Roche Pot of Gold. -
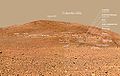 Trajet de Spirit jusqu'à Husband Hill.
Trajet de Spirit jusqu'à Husband Hill. -
 Spirit a artificiellement été ajouté à l'image (prise par lui-même) de Larry's Lookout.
Spirit a artificiellement été ajouté à l'image (prise par lui-même) de Larry's Lookout. -
 Coucher du soleil martien photographié par Spirit au cratère Gusev, le 19 mai 2005.
Coucher du soleil martien photographié par Spirit au cratère Gusev, le 19 mai 2005.




Le 7 mars se produit une tempête qui obscurcit l'ensemble du ciel et recouvre de poussière aussi bien les objectifs des caméras ainsi que les panneaux solaires. Fort heureusement le 9 (probablement lors de la nuit), caméras et panneaux solaires sont nettoyés par de nouveaux vents : l'alimentation électrique passe à 700 puis à 800 watts-heures, rechargeant complètement les batteries. Les réserves énergétiques du rover s'élèvent de près de 60 % à 93 %.
Le 10 mars, l'observation de tourbillons de poussière est spectaculaire. Même si ces tourbillons avaient déjà été repérés en 1997 par la sonde Pathfinder, l'étude de leur évolution (par rafales de photos) par Spirit et Opportunity constitue sans conteste l'un des apports les plus importants des missions MER [31].

Le 19 avril, Spirit atteint un affleurement nommé Mathusalem (Methuselah en anglais), qui se révèle particulièrement intéressant, de même qu'un peu plus tard un autre affleurement, baptisé Jibsheet. Le 7 juin, c'est au tour du rocher Backstay d'être analysé. Le 20 juin, Spirit a parcouru 4,5 kilomètres. Le 4 juillet, jour de la fête nationale américaine, il étudie un rocher baptisé, pour la circonstance, Independence Rock. Le 14 juillet, jour de la fête nationale en France, les rochers visités sont baptisés Sourire, Descartes et Bourgeoisie…
Le 21 août (sol 582), Spirit atteint le sommet de la colline Husband Hill, situé à une altitude de 82 mètres. Les images qu'il retransmet alors sont les plus spectaculaires de toute sa mission. Le rover entreprend ensuite une descente par le sud, en direction d'un plateau qu'il a repéré depuis le sommet de la colline : Home Plate.
-
 Vue du sommet prise par le Spirit le 23 août 2005, après terminé la montée de la colline "Husband Hill".
Vue du sommet prise par le Spirit le 23 août 2005, après terminé la montée de la colline "Husband Hill". -
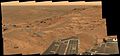 Vision plus large de ce même sommet.
Vision plus large de ce même sommet. -
 Perspective en descendant la colline "Husband Hill".
Perspective en descendant la colline "Husband Hill".

2006
[modifier | modifier le code]À l'origine, Spirit devait être dirigé sur la face nord de la colline McCool Hill (en), où il aurait bénéficié d'un ensoleillement maximal pendant l'hiver. Mais le 16 mars, sa roue avant droite cesse de fonctionner. Sa mobilité s'en trouve si réduite que les techniciens du JPL le font se déplacer en marche arrière. Le rover progresse encore vers la colline, faisant glisser sa roue brisée[32].
Home Plate

le 7 février (sol 744), le rover atteint finalement un affleurement stratifié de forme circulaire nommé "Home Plate", autour duquel et sur lequel il va évoluer jusqu'à la fin de ses activités, en 2009.


De surcroît, à la fin du mois de mars, le rover rencontre un sol meuble qui entrave sa progression. La décision est prise de mettre fin aux tentatives d'atteindre la colline et de stationner sur une crête à proximité, nommée Low Ridge Haven.

Après avoir effectué des observations des changements dans la région environnante[33]. Spirit atteint Low Ridge Haven le 9 avril, s'immobilisant sur une pente présentant une inclinaison de 11 degrés vers le nord, soit la meilleure exposition au soleil. Il y demeure les sept mois suivants, qui correspondent à l'hiver. Il ne reprend ses activités qu'en novembre.
Pendant son séjour à Low Ridge, Spirit a photographié deux roches de nature chimique semblable à celle de Heat Shield Rock, découverte par Opportunity, une météorite sur la surface de Mars. Nommées Zhong Shan d'après Sun Yat-sen et Allan Hills d'après Allan Hills, localisation dans l'Antarctique où plusieurs météorites martiennes ont été trouvées, elles se détachaient sur les rochers de fond qui étaient plus sombres. Des essais de spectrographes sont en cours[Quand ?] pour déterminer la composition exacte de ces roches, qui peuvent se révéler aussi être des météorites.
2007
[modifier | modifier le code]Spirit demeure aux abords de Home Plate. Le sol 1306, il grimpe dessus en empruntant sa bordure orientale. En juillet-août, il subit une tempête de poussière, ce qui l'immobilise pendant six semaines. En septembre-octobre, il examine les roches et les sols à plusieurs endroits sur la moitié sud du plateau. Le 6 novembre, il atteint la limite ouest du plateau, prenant notamment un panorama de la vallée occidentale, avec Grissom Hill et Husband Hill visibles.
2008
[modifier | modifier le code]Ce panorama est publié sur le site de la NASA le 3 janvier sans susciter beaucoup d'attention. Mais le 23 janvier, un site indépendant s'attarde sur un détail de l'image qui montre un rocher de quelques centimètres de haut ressemblant à une figure humanoïde vue de côté avec son bras droit partiellement levé[34],[35].
Le 23 octobre, le rover effectue ses premiers mouvements de roues depuis février. Le 9 novembre, les panneaux solaires n'ont emmagasiné que 89 Wh, ce qui est la quantité quotidienne d'énergie la plus faible jamais enregistrée depuis le début de la mission.
2009
[modifier | modifier le code]En février, la situation s'améliore un peu car les panneaux solaires sont partiellement nettoyés par le vent. Il est prévu que Spirit se dirige vers les formations Von Braun et Goddard, situées à 200 mètres au sud, depuis Home Plate, ceci afin d'effectuer le trajet le plus court mais cette manœuvre échoue, en partie à cause du handicap de la roue avant droite. Spirit est donc conduit à faire le tour de Home Plate. En chemin, Il analyse une roche baptisée Stapledon, qui s'avère riche en silice, une preuve du passé hydrothermal du terrain. En mars, il se déplace de 13 puis de 26 mètres, ses plus longs trajets effectués depuis des mois.
Les 11 et 13 avril (sols 1874 et 1876), d'importants dysfonctionnements surviennent sur l'ordinateur central, qui se reproduisent quelques jours plus tard. Le 24 avril, alors que les problèmes informatiques ne sont pas élucidés, le rover se déplace de 1,7 mètre. Le 1er mai, l'ordinateur semble fonctionner de nouveau et le vent a un peu nettoyé les panneaux. En revanche, le sol sablonneux génère de grosses difficultés car Spirit patine. Le 10 mai, il s'enlise dans les sables d'une zone appelée « Troy » d'où les techniciens ne parviendront jamais à l'extraire.
2010
[modifier | modifier le code]Le 26 janvier (sol 2158), la NASA renonce à dégager le rover et lui donne le statut de « station de recherche stationnaire »[36]. Le 22 mars (sol 2210), la communication avec le rover est perdue[37].
2011
[modifier | modifier le code]Le 25 mai, la NASA met un terme définitif à ses tentatives pour rétablir le contact avec le rover. Finalement, celui-ci aura parcouru 7 730,5 mètres[37], soit 12 fois plus que ses concepteurs l'avaient prévu[38], et transmis plus de 124 500 photographies [38].
Résultats scientifiques
[modifier | modifier le code]Autres rovers martiens
[modifier | modifier le code]On dénombre cinq engins à s'être déplacé sur le sol martien. Spirit est le deuxième d'entre eux. Les quatre premiers sont de fabrication américaine.
- Sojourner : lancé le 4 décembre 1996, le tout premier rover ne pesait que 10,6 kg et n'a parcouru qu'une centaine de mètres, du 4 juillet au 27 septembre 1997.
- Opportunity : le jumeau de Spirit a - comme lui - quitté la Terre durant l'été 2003 et s'est posé sur Mars en janvier 2004. Mais il s'est montré beaucoup plus résistant que lui puisqu'il est resté actif pendant plus de quatorze ans, parcourant ainsi plus de 45km. Il a été mis en sommeil par la NASA le 10 juin 2018 à la suite de violentes tempêtes, qui ont encrassé ses panneaux solaires[39]. Et en 2019, la NASA a annoncé officiellement sa mise hors service[40].
- Curiosity : lancé le 26 novembre 2011, plus lourd et plus puissant que les deux "MER", le dernier rover n'est pas, comme eux, alimenté par des panneaux solaires mais par un générateur nucléaire, ce qui l'autorise à fonctionner par toutes saisons et de jour comme de nuit. Ayant atteint la surface de Mars le 6 août 2012, il a parcouru 30,78 km le 31 août 2023[41].
- Perseverance : lancé le 30 juillet 2020, son but est d'explorer le cratère Jezero dans le cadre de la mission Mars 2020 de la NASA. De conception similaire à Curiosity, il également alimenté par un générateur nucléaire. Il a atterri sur Mars le 18 février 2021 et a parcouru 24,661 km le 1er février 2024.
- Zhurong : lancé le 23 juillet 2020, Zhurong est le premier rover martien chinois. Il a atterri sur Mars le 14 mai 2021 et fut déployé avec succès le 22 mai 2021. Pesant environ 240 kg, il est plus grand que les deux MER, mais fait environ un quart de la taille de Curiosity et de Perseverance. Sa durée de vie opérationnelle est estimée à 90 sols martiens, et il a parcouru environ 1,2 km en décembre 2023.
Notes et références
[modifier | modifier le code]- The scientific objectives of the Mars Exploration Rover
- NASA.gov, MER-A 20040121a
- Mars Exploration Rover Mission: The Mission
- (en) Kenneth Chang, « Martian Robots, Taking Orders From a Manhattan Walk-Up », The New York Times, (lire en ligne, consulté le )
- (en) Steve Squyres, Roving Mars : Spirit, Opportunity, and the Exploration of the Red Planet, Hyperion Press, , 113–117 p. (ISBN 978-1-4013-0149-1, lire en ligne)
- « Launch Event Details – When did the Rovers Launch? »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) (consulté le )
- « Mars Exploration Rover project, NASA/JPL document NSS ISDC 2001 27/05/2001 »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) (consulté le )
- (en) « NASA Spirit Rover Completes Mission on Mars », Jet Propulsion Laboratory, (consulté le )
- « Special Issue: Spirit at Gusev Crater », Science, no 5685, , p. 737–900 (lire en ligne)
- (en) Henry Fountain, « Crater was Shaped by Wind and Water, Mars Rover Data Shows », New York Times, (lire en ligne)
- (en) Amos, Jonathan, « Nasa accepts Spirit Mars rover 'stuck for good' », BBC News, (lire en ligne) :
« The US space agency (Nasa) has conceded defeat in its battle to free the Spirit rover from its Martian sand trap. The vehicle became stuck in soft soil back in May last year and all the efforts to extricate it have failed. »
- (en) Brown, Dwayne et Webster, Guy, « Now a Stationary Research Platform, NASA's Mars Rover Spirit Starts a New Chapter in Red Planet Scientific Studies », NASA, (consulté le ) : « Washington – After six years of unprecedented exploration of the Red Planet, NASA's Mars Exploration Rover Spirit no longer will be a fully mobile robot. NASA has designated the once-roving scientific explorer a stationary science platform after efforts during the past several months to free it from a sand trap have been unsuccessful. »
- September 30 – October 5, 2010 Spirit Remains Silent at Troy NASA. 2010-10-05.
- A.J.S. Rayl Mars Exploration Rovers Update The Planetary Society November 30, 2010
- (en) Guy Webster, « NASA's Spirit Rover Completes Mission on Mars », NASA, (consulté le )
- (en) « NASA Concludes Attempts to Contact Mars Rover Spirit », NASA (consulté le )
- (en) Kenneth Chang, « NASA to Abandon Mars Spirit Rover », New York Times, (lire en ligne)
- (en) « Spirit Update Archive », NASA/JPL (consulté le )
- (en) « Spirit Updates » (consulté le )
- Gusev Crater
- Ses coordonnées : 14,5718° S, 175,4785° E, Destination Mars, Rover headed toward hilly vista for martian exploration
- Les caméras panoramiques (PanCam) des MER sont des instruments en noir et blanc. Treize filtres rotatifs produisent des images multiples de la même scène à différentes longueurs d'onde. Une fois reçues sur Terre, ces images peuvent être combinées pour produire des images en couleur « MER color imagery, methods »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) (consulté le )
- La première image en couleur, obtenue par compilation d'images prises par la caméra panoramique de Spirit était alors l'image avec la plus haute résolution jamais prise depuis la surface d'une autre planète que la Terre. « Nous voyons une mosaïque panoramique d'images Pancam de rapport hauteur/largeur égal à 4/3 », a déclaré Jim Bell, concepteur des caméras, de l'Université Cornell. La photographie avait à l'origine une taille complète de 4000 par 3000 pixels. Toutefois, un panorama Pancam est même 8 fois plus grand, et pourrait être pris en stéréo (soit deux images complètes, rendant la résolution deux fois plus grande encore). Les couleurs sont assez fidèles.
- APOD: 2004 January 14 – A Mars Panorama from the Spirit Rover
- Baptisé ainsi, en référence au cavalier sans tête, personnage d'un film fantastique de Tim Burton
- Planetary Blog.
- baptisé en référence un massif montagneux des Appalaches, aux États-Unis.
- (en) Golombek, et al., « Surfical geology of the Spirit rover traverse in Gusev Crater: dry and desiccating since the Hesperian » [PDF] (consulté le ) : « The rim is ~3 m high and although the crater is shallow (~10 m deep) », p. 1
- Baptisées ainsi en commémoration de la navette Columbia, détruite un an plus tôt lors de sa rentée sur Terre
- "We're still trying to work out what this means, but clearly, with this much salt around, water had a hand here"
- (en) Leonard David, « Spirit Gets A Dust Devil Once-Over », Space.com, (consulté le )
- Mars Exploration Rover Mission: All Spirit Updates
- NASA – NASA Mars Rovers Head for New Sites After Studying Layers
- Planetary.org Emily Lakdawalla, Teeny little Bigfoot on Mars, January 23, 2008 | 12:41 PST | 20:41 UTC
- Spirit's West Valley Panorama image
- news.bbc.co.uk
- « Spirit status », NASA (consulté le )
- Espace & Exploration, no 4 juillet/août 2011. (ISSN 2114-1320). p. 12
- Opportunity Updates
- La NASA confirme la mort du robot martien Opportunity, Le Monde, 13 février 2019
- On peut régulièrement suivre son kilométrage sur un site du JPL :http://mars.nasa.gov/msl/mission/whereistherovernow/
Bibliographie
[modifier | modifier le code]- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, , 529 p. (ISBN 978-0-387-09627-8)Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1997 et 2003.
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9, LCCN 2009039347).
- (en) NASA, Mars Exploration Rover Launches Press Kit, (lire en ligne)Synthèse pour la presse de la mission publiée avant le lancement des sondes MER
- (en) R. Braun et R Manning, Mars Exploration Entry, Descent and Landing Challenges, (lire en ligne)Description technique du problème soulevé par l'atterrissage sur Mars (EDL) et des solutions par 2 spécialistes du JPL
- (en) Erik M. Conway, Exploration and engineering : the Jet propulsion laboratory and the quest for Mars, Baltimore, Johns Hopkins University Press, , 418 p. (ISBN 978-1-4214-1605-2, lire en ligne) — Histoire du programme d'exploration martien du Jet Propulsion Laboratory
Voir aussi
[modifier | modifier le code]Articles connexes
[modifier | modifier le code]- Mars Exploration Rover La mission englobant les rover Spirit et Opportunity : historique et caractéristiques détaillées des rovers
- Exploration de Mars
- Opportunity, l'autre astromobile MER
- Curiosity, successeur des astromobiles MER
- Sojourner, le précurseur
Liens externes
[modifier | modifier le code]- (en) Portail de la NASA consacré aux rovers de la mission MER
- (fr) Site de l'ENS Lyon qui suit l'actualité des sondes martiennes
- (en) The Planetary Society : articles fouillés et fréquents sur l'activité des rovers
- (fr) Nirgal : un site très complet sur la planète Mars et le programme d'exploration
- (fr) Vidéo documentaire de National Geographic sur la mission MER

