
Remontage automatique
Pour les articles homonymes, voir Automatic.

Une montre à remontage automatique, appelée aussi montre automatique, est une montre mécanique dont le remontage s'effectue grâce à un mécanisme qui permet de réarmer le ressort du barillet durant le port de la montre. Ainsi les mouvements effectués par le porteur emmagasinent de l'énergie qui active le mouvement de la montre. Une montre automatique dispose d'une réserve de marche, variable selon les modèles, avant de s'arrêter. Les personnes qui désirent conserver plusieurs montres en fonctionnement sans avoir à les porter peuvent faire usage d'un tourne-montre.
Une montre automatique est toujours moins précise qu'une montre à quartz mais plaît souvent plus aux amateurs de mécanique et d'horlogerie.
Invention[modifier | modifier le code]
Les historiens ne sont pas unanimes concernant l'origine de cette invention[1],[2]. Pour certains, c'est le Suisse Abraham Louis Perrelet qui invente ce dispositif en 1777[3], pour d'autres c'est le Liégeois Hubert Sarton en 1778 avec un remontage à rotor[4].
Ce dispositif ne fut massivement utilisé qu'avec l'avènement des montres-bracelets au début du XXe siècle. De nos jours, le remontage manuel est loin d'avoir disparu et beaucoup de montres mécaniques haut de gamme utilisent ce dispositif de remontage.
Mécanismes[modifier | modifier le code]
Il existe plusieurs mécanismes de remontage automatique, mais le plus répandu est le remontage à rotor. Le principe est assez simple. Tout d'abord, un rotor tourne sur lui-même tout en entraînant un engrenage qui sert de réducteur mécanique. En diminuant la vitesse de rotation pour augmenter le couple, on peut remonter le ressort du barillet. De plus, cet engrenage permet au rotor de remonter la montre indépendamment du sens de la rotation grâce à un mécanisme à encliquetage interne qui fait en sorte que l'engrenage qui multiplie le couple tourne toujours dans le même sens. Étant donné que le rotor doit avoir un grand balourd ou une grande inertie pour pouvoir remplir sa tâche, les matériaux les plus couramment utilisés pour le fabriquer sont : le platine, l'or et le carbure de tungstène.
Afin de bénéficier de la précision du quartz, il existe des montres automatiques à quartz, dans lesquels les oscillations du rotor actionnent une génératrice. La vitesse de rotation de la génératrice est régulée par un IC et un quartz[5]. L'énergie est stockée, soit dans un barillet (système Spring Drive et montre Piaget Emperador coussin XL700P[6]), soit dans un accumulateur (systèmes Kinetic[7] de Seiko et Autoquartz[8] de ETA).
Micro-rotor[modifier | modifier le code]

Dans un mouvement à micro-rotor, le rotor est excentré et bien plus petit que le mouvement. Il en occupe par contre presque toute l'épaisseur. Cette solution permet de réaliser un mouvement plus fin, car le rotor se situe dans le même plan que les autres éléments, et non derrière eux. Il permet aussi d'exposer visuellement une plus grande partie du mouvement. Ces mouvements sont moins répandus que les automatiques à rotor central, et tendent à être plus chers. Le bras de levier de la masselotte est réduit, ce qui limite l'énergie disponible[9].
Marteau[modifier | modifier le code]
Dans un mouvement « à marteau », la masse oscillante n'effectue pas des rotations complètes, mais des aller-retour sur un petit angle de débattement.
Masse périphérique[modifier | modifier le code]

Certains mouvements possèdent un rotor périphérique, sans moyeu. Il s'agit d'un anneau, beaucoup plus lourd d'un côté que de l'autre, qui entoure complètement le mouvement. Comme le micro-rotor, cette solution permet de réaliser un mouvement très plat, et très exposé visuellement, mais le débattement de la masselotte est beaucoup plus grand. Le rotor périphérique ne se rencontre habituellement que sur des pièces de haute horlogerie[10]. Cependant, on la retrouve sur le mouvement économique Sistem51 de Swatch[11].
Fonctionnement[12][modifier | modifier le code]
Le système est en général constitué d'une masse oscillante, aussi appelé rotor, dont le centre de gravité ne se situe pas sur l'axe de rotation. On rencontre des grands rotors dont l'axe de rotation est centré sur le mouvement et des micro-rotors excentrés.
Le rotor présente donc un balourd[13] et une inertie[14].
-
 a) Rotor centré
a) Rotor centré -
 b) Rotor excentré
b) Rotor excentré



Trois types de mouvements du bras[modifier | modifier le code]
L'efficacité du remontage automatique dépend beaucoup de la nature des mouvements du bras :
a) Les mouvements lents du bras font que le centre de gravité de la masse oscillante ne se trouve plus exactement sous l'axe de rotation. Le balourd du rotor provoque un couple sur l'axe du rotor :

- avec :

- : masse du rotor (kg) ;
- : accélération terrestre (m/s2) ;
- : distance entre le centre de gravité et l'axe de rotation (m) ;
- : poids du rotor (N) ;
- : balord du rotor (kg m) ;
- : déplacement angulaire du centre de gravité par rapport à la direction de l'accélération (rad).





b) Les mouvements linéaires rapides du bras provoquent des accélérations linéaires de la montre et la masse du rotor produit un couple sur l'axe de celui-ci.

- avec :
- : accélération linéaire de la montre (m/s2).

c) Les mouvements rotationnels rapides du bras provoquent des accélérations angulaires de la montre et l'inertie du rotor produit un couple sur l'axe de celui-ci.


- avec :
- : inertie du rotor par rapport à l'axe de rotation (kg m2) ;
- : accélération angulaire de la montre (rad/s2).

Ces trois types de mouvements produisent des couples qui font tourner la masse oscillante. Un pignon fixé sur la masse va entraîner, via le rouage, le rochet du barillet qui armera le ressort de barillet.
Le rouage réducteur[modifier | modifier le code]

Le couple obtenu grâce au balourd de la masse oscillante n'est de loin pas suffisant pour remonter le ressort de barillet directement. Un rouage réducteur est nécessaire afin d'obtenir un couple suffisant. Le rouage réduira la vitesse de rotation, et il augmentera le couple sur le ressort de barillet.
Dans l'image ci-contre on a :
- Pignon de masse oscillante ;
- Redresseurs de sens ;
- Mobiles de réduction ;
- Rochet.
Les sens de rotation du rotor[modifier | modifier le code]
La masse oscillante peut tourner aussi bien dans un sens que dans l'autre. Par contre, le ressort de barillet ne doit être armé que dans un sens. Pour résoudre ce problème, deux solutions sont possibles :
a) « Débrancher » la masse oscillante du rouage lorsqu'elle ne tourne pas dans le bons sens. On obtient un remontage monodirectionnel, c'est-à-dire qu'un seul des deux sens de rotation de la masse oscillante participe à l'armage du barillet ;
b) Ajouter ou retirer un mobile avant le rouage réducteur en fonction du sens de rotation de la masse oscillante. On maintient ainsi le sens de rotation du rouage réducteur indépendant de celui de la masse oscillante. On obtient un remontage bidirectionnel, c'est-à-dire que les deux sens de rotation de la masse oscillante arment le ressort du barillet.
Pour réaliser ces fonctions, on utilise principalement quatre types d'éléments :
- le cliquet mobile (ou cliquet moteur) ;
- la roue libre (souvent constituée de cliquets mobiles) ;
- le renvoi basculant ;
- le cliquet fixe.
Les trois premiers éléments permettent d'entraîner le rouage réducteur dans un sens. Le dernier élément retient le rouage s'il n'est pas entraîné afin que le ressort de barillet ne se désarme pas.
Remontage monodirectionnel[modifier | modifier le code]
Pour le remontage monodirectionnel le système le plus simple comprend :
- un cliquet mobile + un cliquet fixe
- Dans la figure ci-dessous, le cliquet C est mobile, et dans ce cas particuliers, il se déplace verticalement. Le clique fixe C′ empêche le recul lorsque le cliquet mobile saute.
- Système de remontage automatique monodirectionnel
-
 Remontage monodirectionnel avec roue à cliquet verticale
Remontage monodirectionnel avec roue à cliquet verticale

On rencontre beaucoup d'autres systèmes avec par exemple :
- une roue libre + un cliquet ;
- un renvoi basculant + un cliquet.
Remontage bidirectionnel[modifier | modifier le code]
On montre ici trois solutions, mais il existe de nombreuses autres solutions qui souvent ressemblent à l'une de ces trois solutions.
Pour le remontage bidirectionnel les systèmes les plus répandus sont :
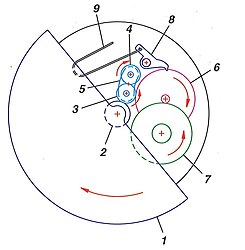
- Un double renvoi basculant
- Le pignon de masse 2 entraîne les renvois 3 et 4 montés tous deux sur une plaque 5 pouvant basculer.
- Dans un sens de rotation du rotor, c'est le premier renvoi 3 qui engrène avec le premier mobile 6 du rouage démultiplicateur.
- Dans l'autre sens de rotation du rotor, la plaque 5 bascule et c'est le deuxième renvoi 4, qui engrène avec le mobile 6.
- Lorsque le sens de rotation du rotor change, le renvoi 4 est inséré ou pas dans la chaîne du rouage. Ceci permet de maintenir le sens de rotation du rouage démultiplicateur.
- Un cliquet supplémentaire 8 est nécessaire pour retenir le rouage démultiplicateur lorsqu'aucun renvoi n'est en prise, pendant les changements de sens du rotor.
- Système de remontage automatique bidirectionnel avec deux renvois
-
 a) Remontage en SAM (Sens des Aiguilles de Montre)
a) Remontage en SAM (Sens des Aiguilles de Montre) -
 b) Remontage en SIAM (Sens Inverse des Aiguilles de Montre)
b) Remontage en SIAM (Sens Inverse des Aiguilles de Montre)


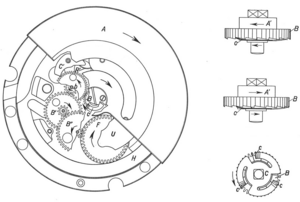
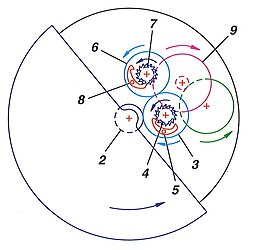
- Deux roues libres
- Le pignon de masse 2 entraîne deux roues libres 3 et 6 tournant en sens inverse l'une de l'autre.
- Dans un sens de rotation du rotor, c'est la première roue libre 3 qui transmet son mouvement à la roue à dent de loup 4, via le cliquet 5. Le cliquet 8 saute.
- Dans l'autre sens de rotation du rotor, c'est la deuxième roue libre 6 qui transmet son mouvement à la roue à dent de loup 7, via le cliquet 8 alors que le cliquet 5 saute.
- Les sorties des roues libres (roues à cliquet 4 et 7) tournent donc toujours dans le même sens et elles sont en prise avec le rouage démultiplicateur 9 et 10. Le sens de rotation du rotor change, mais pas celui du rouage démultiplicateur.
- Aucun cliquet supplémentaire n'est nécessaire, les roues libres contenant chacune plusieurs cliquets, se chargent de retenir le rouage démultiplicateur pour ne pas désarmer le ressort de barillet.
- Système de remontage automatique bidirectionnel avec deux roues libres
-
 a) Remontage en SAM (Sens des Aiguilles de Montre)
a) Remontage en SAM (Sens des Aiguilles de Montre) -
 b) Remontage en SIAM (Sens Inverse des Aiguilles de Montre)
b) Remontage en SIAM (Sens Inverse des Aiguilles de Montre)


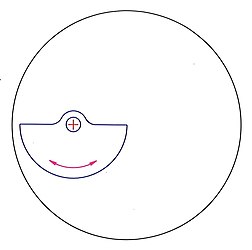
- Un excentrique et deux cliquets
- L'excentrique O imprime un mouvement de va-et-vient au levier B′ portant le cliquet mobile C. Selon le sens du mouvement du levier B′ , le cliquet mobile C entraîne la roue à dents de loup B″ . Dans l'autre sens du mouvement du levier B′, le cliquet fixe C′ empêche le recul de la roue à dents de loup B″ alors que le cliquet mobile C saute.
- Système de remontage automatique bidirectionnel
-
 Remontage bidirectionnel avec un excentrique et deux cliquets
Remontage bidirectionnel avec un excentrique et deux cliquets

Limitation du couple[modifier | modifier le code]

Lorsque le ressort de barillet est complètement armé, les mouvements de la masse oscillante risquent de casser le ressort. Il est donc nécessaire de « débrayer » le système d'armage automatique afin de limiter le couple sur le ressort. Pour cela, la dernière spire du ressort de barillet n'est pas fixée au barillet, mais seulement appuyée contre le tambour.
On ajoute tout de même une bride glissante dont le but est d'appuyer plus fortement la dernière spire du ressort contre le tambour de barillet.
Ainsi, la rotation de la masse oscillante fera patiner la spire extérieure du ressort contre le tambour au lieu de l'entraîner.
Pivotement de la masse[modifier | modifier le code]
On différencie principalement deux types de pivotement de la masse : entre pierres ou sur roulement à billes. Dans les nouvelles construction, on utilise systématiquement le pivotement sur roulements à billes.
- Entre pierres

- Sur roulement à billes

Notes et références[modifier | modifier le code]
- article de Grégory Pons dans Business Montres – La lettre internationale des marchés horlogers du 19 décembre 2006.
- Site de Joseph Flores, qui remet en cause l'attribution du titre « d'inventeur des montres automatiques » à Abraham Breguet.
- Article Abraham Louis Perrelet sur hautehorlogerie.org.
- « Les dispositifs automatiques "à rotor" »
- Jean-Jacques Born, Rudolf Dinger et Farine, « SALTO-Un mouvement mécanique à remontage automatique ayant la précision d'un mouvement à quartz », Journée d'Etude SSC,
- « Emperador coussin XL700P » (consulté le )
- Article Kinetic sur [1].
- « ETA 205.911 Autoquartz » (consulté le )
- « Technique - Micro-rotor, maxi possibilités - Innovation et technique - WorldTempus », sur fr.worldtempus.com (consulté le )
- (en) « Technology - Peripheral rotors: a rare breed - Innovation and technology - WorldTempus », sur en.worldtempus.com (consulté le )
- (en) Felix Scholz, « Swatch Sistem51 Irony – Hands-on Review », sur Time and Tide Watches, (consulté le )
- Pour décrire le fonctionnement du remontage automatique, beaucoup d'images ont été empruntées aux ouvrages Théorie d'horlogerie (Charles-André Reymondin) et La montre suisse à remontage automatique (Bernard Humbert).
- Le balourd est le produit de la masse du rotor multipliée par la distance entre le centre de gravité et l'axe de rotation.
- L'inertie est le produit de la masse par le carré de la distance entre le centre de gravité et l'axe de rotation.
Articles connexes[modifier | modifier le code]
Bibliographie[modifier | modifier le code]
- Joseph Flores, Perpétuelles à roue de rencontre ou Montres automatiques, une page d'histoire : analyse d'un document de l'Académie française de 1778 et de ses conséquences historiques, Besançon, Néo, , 160 p. (ISBN 2-914-74102-2, BNF 37718591)
- Charles-André Reymondin, Georges Monnier, Didier Jeanneret et Umberto Pelaratti, Théorie d'horlogerie, Neuchâtel, Fédération des écoles techniques suisses (FET), , 368 p. (ISBN 2-940025-47-9)
- Bernard Humbert, La montre suisse à remontage automatique, Lausanne, Journal suisse d'horlogerie et de bijouterie,