
Drone quadrirotor

Un drone quadrirotor est un drone (appareil sans pilote embarqué), reprenant le principe des aéronefs quadrirotors, et pouvant fonctionner de manière autonome, ou piloté par un pilote au sol. Il en existe de plein de types et tailles, adaptés à différentes utilisations. Ce type de drone peut être utilisé en essaim de drones.
Types de drones quadrirotors[modifier | modifier le code]
Il existe différents types de drones quadrirotors adaptés à différents usages. Usage sportif (course, freestyle), de prise de vue (aux commandes plus souples, pour une prise de vue plus stable), ou encore affectés à des tâches de sécurité, de cartographie, d'évaluation des stocks, ou encore de transport. Certains peuvent convenir à différentes de ces tâches, selon le matériel qu'ils comportent ou qu'on y ajoute, ou encore, selon les programmes de la carte de vol.
Drones sportifs[modifier | modifier le code]
Sur les drones de course (en anglais, FPV Quadcopter), un domaine plus réservé au hackers, où les drones sont modifiés pour les besoins des utilisateurs, les vitesses peuvent passer de 0 à 100 km/h en 1 seconde et les stabilisateurs sont souvent coupés afin d'augmenter la manœuvrabilité. Des Visiocasques sont alors utilisés pour le pilotage en immersion (ou FPV dans le jargon), par opposition au vol à vue dans ce domaine, décrivant un vol sans visiocasque en utilisant la commande et regardant le drone évoluer (à ne pas confondre avec le vol à vue en aéronautique qui s'oppose au vol aux instruments), et des systèmes de transmissions plus rapides, et permettant les défauts d'affichage (bruit, basse résolution) afin d'éviter les latences, sont utilisés[pas clair].
Il est généralement possible de leur ajouter une caméra embarquée haute définition. Celle-ci filmera en meilleure qualité que ce qui est transmis en direct au pilote. Cela permet de visualiser en meilleure qualité le trajet effectué par le drone après le déplacement ou de filmer d'autres parties du paysage qui sont visibles depuis le drone.
Drones pour la prise de vue[modifier | modifier le code]
Il existe différents drones spécialisés dans la prise de vue, ils peuvent être assez compact, de taille moyenne, sur lesquels on peut ajouter une caméra embarquée haute définition, ou encore de plus grosse taille, où l'on peut fixer un appareil photographique reflex numérique.
Applications professionnelles[modifier | modifier le code]
Surveillance et sécurité[modifier | modifier le code]

Les drones peuvent être utilisés comme outils de surveillance par les forces de l’ordre afin de superviser des manifestations. Il existe également des drones chasseurs de drones, utilisant par exemple un filet[1], utilisés dans des zones sensibles (espaces aériens, infrastructures vitales, etc.) bien que cette tâche soit souvent dévolue à des rapaces plutôt que des drones.
Agriculture[modifier | modifier le code]
Les drones conçus pour l’agriculture peuvent réaliser des cartographies agronomiques ou même épandre des produits sur les exploitations.
Prises de vues professionnelles[modifier | modifier le code]
Les drones sont de plus en plus utilisés pour la réalisation de prises de vue professionnelles destinées au cinéma ou à la télévision.
Construction et infrastructures[modifier | modifier le code]
Il existe des drones capables de réaliser des travaux de cartographie par photogrammétrie, d’inspection visuelle ou thermique d’infrastructures.
Architecture des drones quadrirotors[modifier | modifier le code]

Un quadrirotor est composé d'une châssis central, comportant le contrôleur de vol (une carte embarquant le microcontrôleur, et différents capteurs), ainsi que la batterie servant à l'alimenter le drone, et en général au moins une caméra. Quatre bras partent de ce châssis central, pouvant être en X ou en H. Au bout de chaque bras est fixé un moteur, entraînant une hélice[2].
Télétransmission[modifier | modifier le code]
Le contrôleur de vol est connecté ou comporte des éléments permettant différents types de télétransmissions selon les modèles de drones. Dans le cas des jouets d'entrée de gamme, le bluetooth est utilisé pour les commandes (portée très faible, jusqu'à 60 m en LTE), les gammes suivantes utilisent du Wi-Fi pour la transmission des commandes et de la vidéo. Pour les plus haut de gamme, des fréquences radio (parfois couplées avec bluetooth et Wi-Fi), sont utilisées pour le contrôle, soit FM en 41 MHz, soit, pour les plus grandes portées (plusieurs kilomètres), en 2,4 GHz, souvent programmables. Dna les télécommandes FM, le firmware libre OpenTX est souvent utilisé.
Le module VTX (en anglais : Video Transmitter) est chargé d'émettre la vidéo en temps-réel au casque de vision. Il peut émettre dans les fréquences de 1,2 GHz, 2,4 Ghz ou 5,8 GHz, la dernière fréquence étant autorisée dans de nombreux pays[3]. Ils émettent généralement de base en 25 mW dans la fréquence des 5,8 Ghz. Il est possible d'augmenter la puissance en 200 mW, mais la réglementation locale peut l'interdire. En France, par exemple, la limite est à 25 mW. Le type d'antenne joue un rôle important dans la transmission, tant sur l'appareil que sur le poste de réception. Maintenant avec plusieurs modifications du réseau Wi-Fi et l'antenne la limite monte à 50 mW. La puissance est de 300 mW et la fréquence est 6,2 GHz.
Batteries[modifier | modifier le code]

Les batteries utilisent généralement des accumulateurs de type Li-Po (lithium-ion polymère). Selon les types d'engins, les batteries sont orientées vers plus d'autonomie (la majorité des cas), ou une plus forte puissance instantanée (drones de course). Un circuit intégré à la batterie permettent de connaître l'autonomie restante et transmettent cette information au contrôleur de vol, afin que le drone puisse se poser en douceur avant qu'elles ne soient complètement vidées.
Les batteries sont décrites par différentes valeurs. Les valeurs 1S, 2S...6S, correspondent au nombre d'éléments. Un élément de base fait 3,7 V lorsqu'il est chargé. Cette valeur augmente à la fin de la décharge[4]. La valeur C (coulomb, valeur de charge), correspond à la capacité de décharge de la batterie, elle est à multiplier par la capacité de la batterie pour atteindre l’intensité de courant maximum que peut fournir la batterie. Par exemple une batterie de 2500 mAh (milliampère/heure, soit 2,5 Ah) qualifiée de 20 C, pourra fournir, 2,5 × 20 = 50 Ah. Cette valeur est à comparer avec la consommation des moteurs pour prévoir une capacité de décharge suffisante pour les utiliser à pleine puissance. Selon la qualité des batteries, elles arrivent plus ou moins à fournir cette puissance maximale et elle remontera plus ou moins vite en tension après cette forte décharge[5].
Contrôleur de vol[modifier | modifier le code]
Les contrôleurs de vols utilisent comme microcontrôleurs les plus populaires, pour les drones les plus simples, les processeurs 8 bits Atmel AVR, et le Microchip PIC, et pour les modèles plus poussés, les processeurs 32 bits STMicroelectronics STM32 F1 ou F3, mais plus couramment le F4 (comporte un (DSP et un FPU) et pour les plus haut de gamme, le F7[6],[7],[8].
Le logiciel de contrôle peut être pour les drones de course, Betaflight, un logiciel libre (sous licence GPLv3[9]) spécialisé, dérivé de Cleanflight. Ils ont généralement la capacité de surimposer un OSD à la vidéo.
Le microcontrôleur, en fonction de l'analyse des senseurs, des contrôles transmis par l'utilisateur et des algorithmes qui ont été programmés vont transmettre aux contrôleur de vitesse électronique (en) (en anglais ESC pour Electronic speed control), la vitesse de rotation du moteur sur lequel est fixé l'hélice[2]. Il y en a quatre, un par hélice.
Le contrôleur de vol intègre généralement gyroscope (pour l'inclinaison) et accéléromètre. Il comporte parfois un module GPS[2].
Propulsion[modifier | modifier le code]
Les moteurs sont des moteurs sans balais (ou « brushless »), de modélisme, dans lesquels les bobines de cuivre sont montés sur le stator et les aimants sur le rotor, à l'inverse des moteurs électriques conventionnels[2]. Les hélices tournent dans 2 sens contraire, les hélices placées à l'opposé l'une de l'autre ayant le même sens de rotation, 2 à 2.
Les hélices fixées aux moteurs sont en plastique ou matériaux composites[2].
D'un point de vue théorique, un drone quadrirotor, peut, grâce à sa propulsion, atteindre une altitude de plus de 5000 mètres en vol[10].
Gimbal[modifier | modifier le code]

La plupart des drones quadrirotor destinés à réaliser des prises de vues aériennes sont équipés d'une caméra montée sur une nacelle stabilisée ou gimbal. Une gimbal est un système électromécanique à 2 ou 3 axes permettant de stabiliser la caméra quels que soient les mouvements du drone. La gimbal permet ainsi d’obtenir des vidéos fluides, sans mouvements parasites ni vibrations, à la manière d’une steadycam.
La gimbal est généralement suspendue au drone via un plateau amortisseur. Ce plateau a pour rôle d’isoler la gimbal des vibrations à haute fréquence provenant du drone.
Vue des différents éléments[modifier | modifier le code]
-
 Carte de vol basée sur un STM32 F1, pour drone de course
Carte de vol basée sur un STM32 F1, pour drone de course -
 Microsystème électromécanique MPU-6050, puce servant de gyroscope et d'accéléromètre pour drone
Microsystème électromécanique MPU-6050, puce servant de gyroscope et d'accéléromètre pour drone -
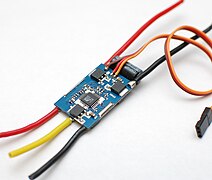 ESC de 35 ampère, les 3 fils plus épais, vont vers le moteur et les plus fins vers la carte de vol.
ESC de 35 ampère, les 3 fils plus épais, vont vers le moteur et les plus fins vers la carte de vol. -
 Carte de vol Arduino, d'un contrôleur de vitesse et d'un moteur
Carte de vol Arduino, d'un contrôleur de vitesse et d'un moteur -
 Éléments principaux d'un drone quadrirotor
Éléments principaux d'un drone quadrirotor -
 Pilotes équipées de leur casques d'immersion et des télécommandes
Pilotes équipées de leur casques d'immersion et des télécommandes -
 écran de FPV avec OSD.
écran de FPV avec OSD. -
 Gimbal 3 axes montée sur plateau amortisseur
Gimbal 3 axes montée sur plateau amortisseur
.jpg)







Annexes[modifier | modifier le code]
Notes et références[modifier | modifier le code]
- Julien Cadot, « Voici un drone chasseur de drone, le cauchemar des pilotes du dimanche », sur Numerama,
- « Composition d'un drone — Drone multirotor ou quadricoptère — Généralités », sur afcadillac.net
- (en) « How to choose 5.8GHz VTX (Video Transmitter) for FPV Mini Quad », sur OscarLiang.com,
- « Que veulent dire **S et **C sur les batterie lipo », sur Forum Drone.fr
- « Lipos, la règle d’or : calculez le nombre de C nécessaires », sur FPV passion
- (it) « DJI Bergamo », sur djibg.it
- Coleman Benson, « Comment fabriquer un drone/UAV – Leçon 4 : Contrôleur de vol », sur Robotshop.com,
- (en) « F1, F3, F4 and F7 Flight Controller Differences Explained », sur OscarLiang.com,
- « LICENSE », sur Betaflight sur GitHube
- « Quelle est l'altitude maximale que peut atteindre un drone multirotor ? », sur Escadrone, (consulté le )
Bibliographie[modifier | modifier le code]
- Adnan Martini, Modélisation et commande de vol d'un hélicoptère drone soumis à une rafale de vent., Metz, Université Paul Verlaine, (présentation en ligne) (HAL)